昨年度からの主な変更点
昨年度からの主な変更点まとめ(PDF)
詳細は以下の各項目を参照
概要
必須課題
- 自律走行:スタートからゴールまで、約 2 km の課題コースを自律走行すること
選択課題
それぞれの選択課題の実施/不実施は、各チームの自由である
本走行当日は、スタート前に各選択課題について実施/不実施を随行委員に申告すること
- A 事前計測なしエリア通過:本走行で初めて訪れるエリア(市役所庁舎内)を自律走行すること(事前にロボットを走行させたり、センサ等を用いて計測することはできない)
- B 信号認識横断:横断歩道において、歩行者用信号機と交差点内の安全を認識し、自律的に走行開始して横断すること(往路と復路で各2回、合計4回の横断)
- C チェックポイント通過+経路封鎖迂回:指定されたチェックポイントをすべて通過し、かつ途中で遭遇した経路封鎖を迂回すること(チェックポイントの番号は前日に通知されるが、経路封鎖の位置は通知されない)
- D1 集荷地点と配達先への訪問:集荷ボックスに接近・停止して配達先を認識したのち、指定の宅配ボックスに接近・停止すること
- D2 荷物の回収と配達:D1において、集荷ボックスに置かれた荷物をロボット自身が回収し、指定の宅配ボックスに入れること
コース地図
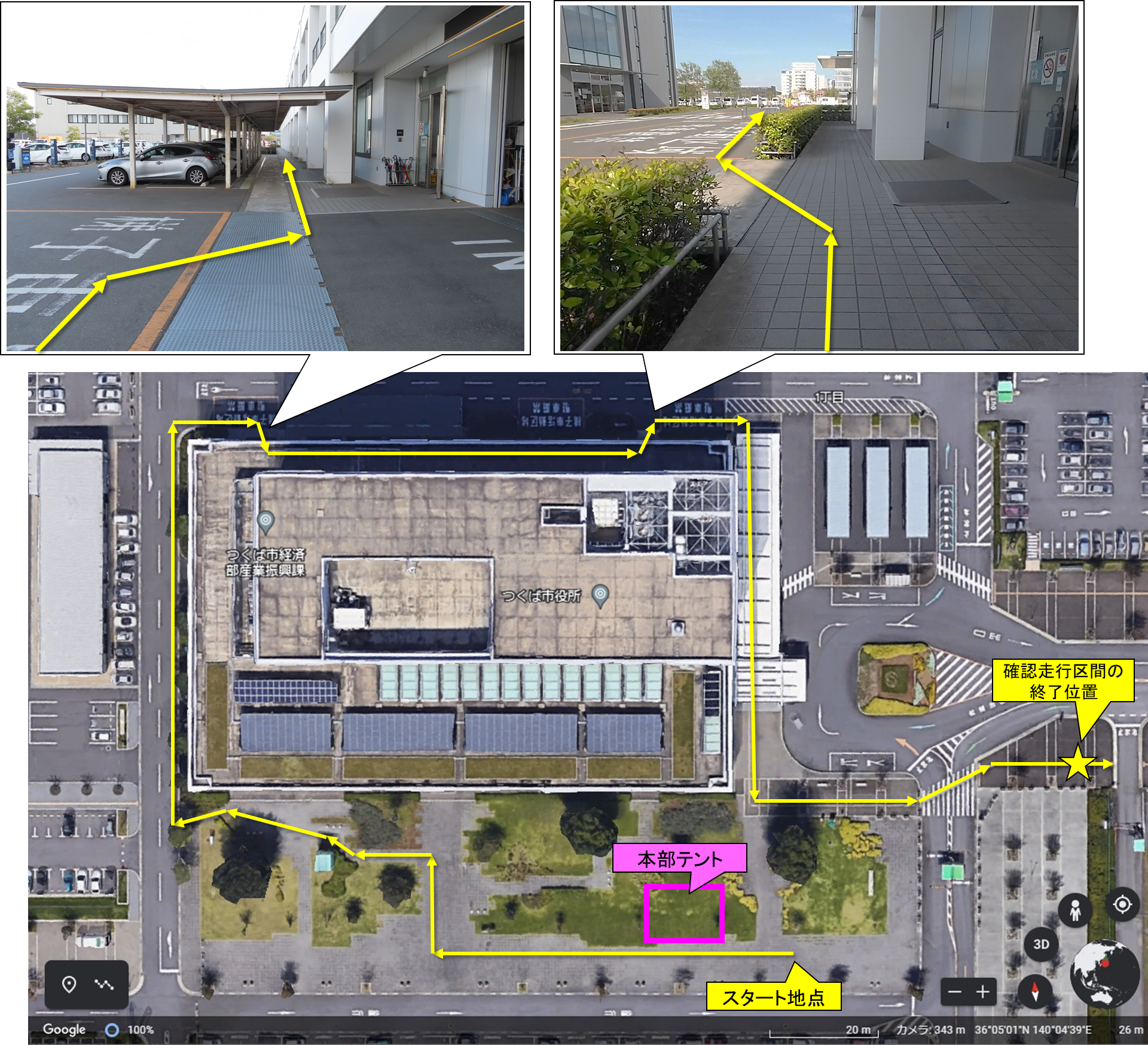
- 市役所庁舎南側をスタートとし、市役所庁舎の外周を一周したのち、研究学園駅南口交差点、研究学園駅前公園を辿り、公園内の折り返し地点を通過したのち、市役所庁舎南東側のゴールへ戻るコースである
- コース上には数ヶ所の一時停止位置が設けられている
- スタートからコース地図の★印までの約 450 m を確認走行区間と呼ぶ
- 市役所庁舎の外周および横断歩道上を除き、車道は進入禁止とする
市役所庁舎の外周の西側と北側の車道では、なるべく右端を走行すること - 公園外周の歩道および公園内の歩道・広場・階段を走行できる
ただし、芝生(コース地図で緑色に塗られた領域)や走行禁止エリア(コース地図で赤色に塗られた領域)に進入してはならない - 公園の北西側の広場(コース地図で黄色に塗られた領域)を配送エリアと呼ぶ
- 本走行では、スタート地点とゴール地点に看板やアルミトラスを設置する
- 市役所庁舎東側の通りの確認走行区間の終了位置の東側には、静止障害物として複数の緑ロードコーンをランダムに配置する
- コース上のスタート・20m・ゴールライン、停止線として白線が貼付される
- 白線テープ:購入先のリンク
- 参考までに白線設営マニュアル(PDF)を貼付する(※現場の貼付位置に従うこと)
コース全体 ※公園内のルートは一例

市役所庁舎周辺(確認走行区間)
市役所庁舎東側の通り沿い

公園内(チェックポイント候補点、配送エリア)

自律走行
全般
- スタート地点から、オペレータ操作により自律走行を開始すること
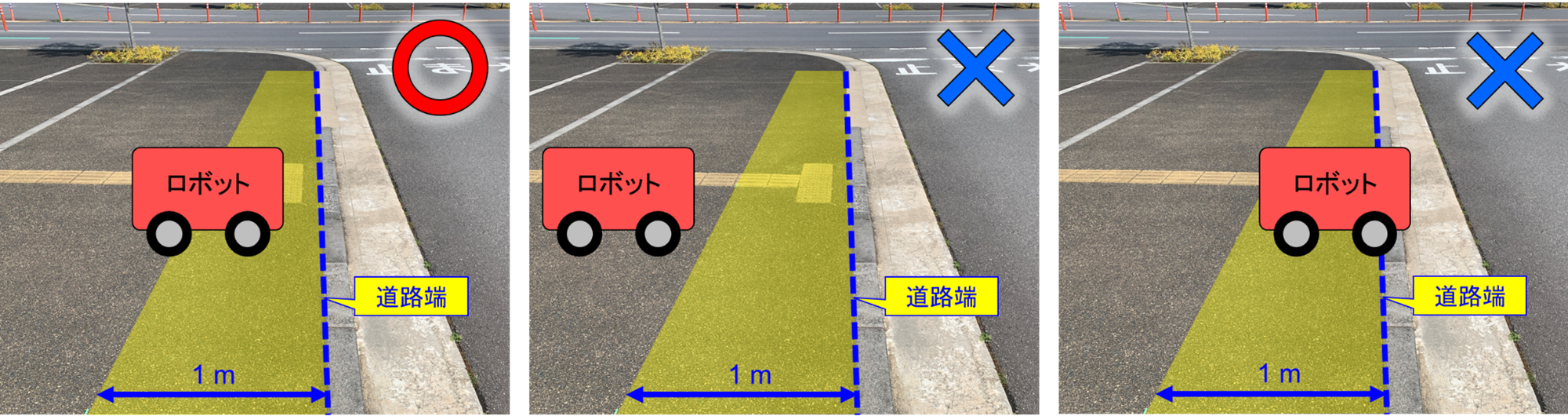
- 一時停止位置では、停止線や道路端の手前 1 m 以内で自律的に一時停止すること
- ロボットの一部が停止線や道路端の手前 1 m 以内の領域に入ること
- ロボットのいかなる部位も道路端を越えていないこと
- 一時停止位置で停止したのち、安全を確認した上で、オペレータの簡単な操作で自律走行を再開すること
- 走行再開の操作をする際には、周囲の人に対して「これから走行再開する」ことを宣言すること
- 走行再開の操作の様子が周囲から見えるようにすること
- 公園内の折り返し地点を通過すること
- ロボット本体が完全にゴールラインを越えたら、自律的に停止すること
- 本走行と記録走行では、スタートからゴールまで100分間以内に走行すること
一時停止位置での停止判定
注意事項
- 危険を感じた場合や、ロボットが走行禁止エリアに進入しそうになった場合は、直ちに非常停止スイッチを押下するなどの操作をし、ロボットを安全に停止させること
- 他のロボットや周囲の人の通行を妨害しないように注意すること
- ロボットに気付いていない人に接近した際は、安全管理責任者が事前に声かけをすること
- 芝生の上を走行すると植生を傷付けるおそれがあるので、自律走行/マニュアル走行/手押し走行を問わず、原則として芝生の上を走行させないこと(本走行、記録走行、確認走行の際は、一時的に芝生に進入しても、即座に走行失敗とは判断しない)
- デバッグなどの作業を行う際には、歩道を塞がないこと
- 市役所庁舎の外周の車道上でロボットが停止した場合には、速やかに安全な場所に退避させること
スタート地点
- スタート位置は左右に2ヶ所あり、4 m 程度離れている
- 通常の実験走行および確認走行では、スタート位置やタイミングは各チームの任意とする
- 本走行でのスタートの左右や出走順は、本走行前日に発表する(同時刻に2台ずつスタート)
- スタートラインを越えるまでは、スタートコール後であってもオペレータはロボットやコントローラに触れることが認められる
- 本走行と記録走行では、以下の要件を満たせなかった場合は走行失敗とする
- スタートコール後、1分間以内にスタートラインを越えること
- スタートコール後、2分間以内に 20 m を越えること
左スタートと右スタートの配置

確認走行区間
- スタートからコース地図の★印までの約 450 m を確認走行区間と呼び、安全チェックに合格したすべてのロボットが自律走行できる
- 確認走行を実施する際には、本部で申請すること
- 随行委員の立会いのもと、この区間で以下の所定の動作が確認できた場合に、「確認走行達成」と認定する
- スタート地点から自律走行を開始し、駐車場出入口の横断歩道の手前 1 m 以内で自律的に一時停止する
- オペレータ操作により走行再開し、横断歩道を渡る
- 横断歩道を通過したのち、随行委員によってロボット前方に置かれた障害物(緑ロードコーン)を検出し、停止または回避する(ロボットが緑ロードコーンの三角錐の部分に接触した場合、確認走行は失敗とする)
- 随行委員の指示でオペレータが非常停止スイッチを押下し、安全に停止する(車輪がフリーになる場合は人手により完全に停止させること)
- 確認走行を達成した際は、すべてのナンバープレートに認定シールを貼る
確認走行の認定シールの有効期限は、当該年度の本走行日まで - 確認走行の認定シールを貼付されたロボットのみが、これ以降の区間での自律走行を許可される
- 確認走行以外では、障害物検出や非常停止スイッチによる停止の確認を行う必要はない
- 本走行の前日まで確認走行未達成のロボットが本走行に臨む場合は、確認走行の手順を実施する
本走行で初めて確認走行を達成した場合、その場で非常停止スイッチを解除して確認走行区間の先へ走行継続してよい
市役所庁舎内:事前計測なしエリア通過(選択課題A)
- 選択課題Aを実施するロボットが、本走行にて1回だけ走行できるエリアである
- 通常の実験走行の際や、本走行で選択課題Aを実施しないロボットは、市役所庁舎の外周を時計回りで走行する
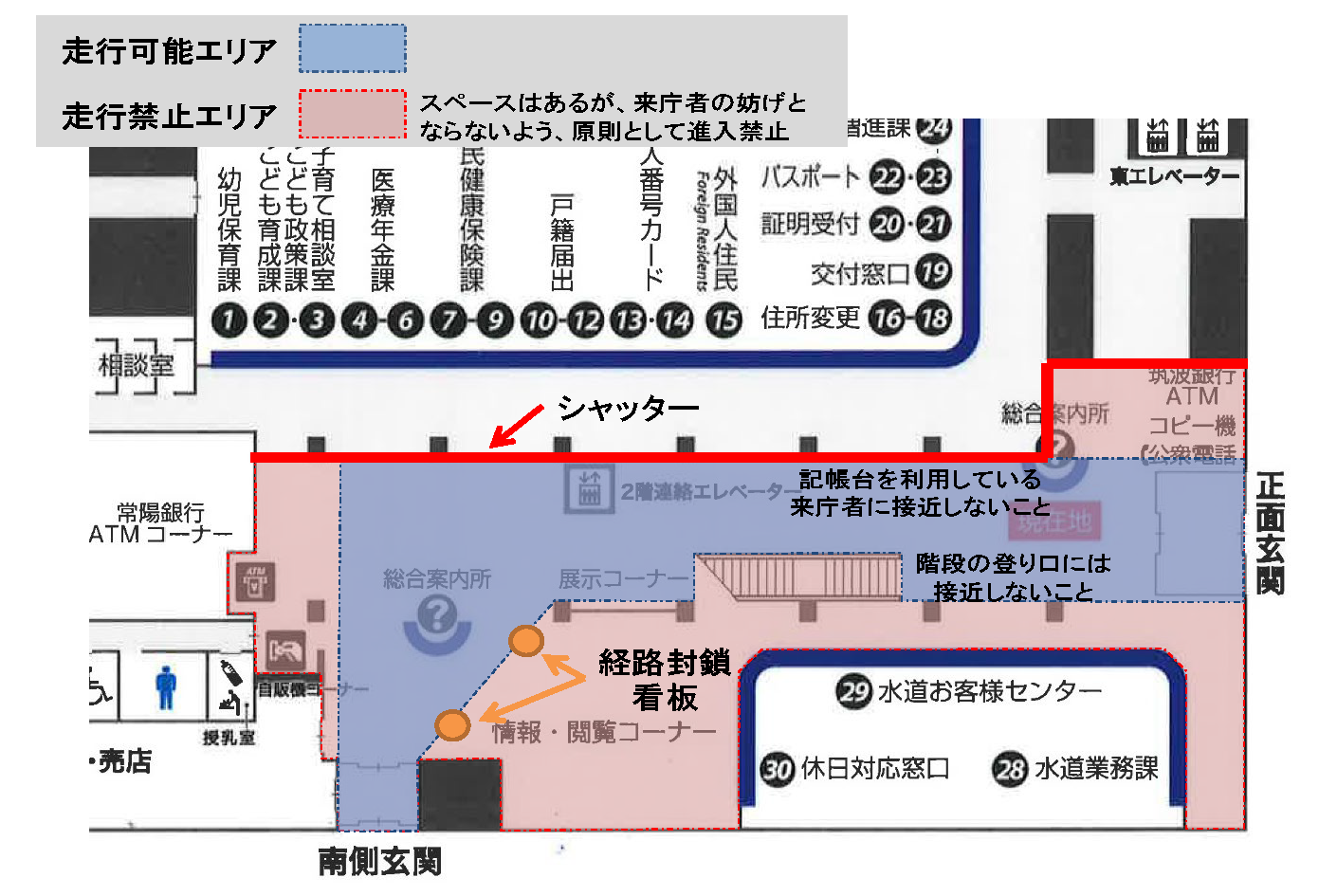
- 選択課題Aを実施するロボットは、南側玄関から市役所庁舎内に入り、正面玄関から出ること
- 選択課題Aに成功したロボットは、市役所庁舎の外周を走行する必要はない
- 事前にロボットを走行させたり、センサ等(カメラ、Lidar、メジャー等)を用いて計測することはできない
- チームメンバーが事前に現場を目視で確認することや、既存のフロアマップなどを利用することは認められる
- 南側玄関から入って右側の走行禁止エリアの境界には、経路封鎖看板(後述)を設置する
- 自律走行を継続できなくなった場合や走行禁止エリアに進入してしまった場合は、選択課題Aの失敗とする
- 選択課題Aが失敗でも自律走行の失敗とはせずに、非常停止スイッチを押下した後にロボットを南側玄関の外側まで戻し、オペレータ操作により走行再開して市役所庁舎の外周(屋外の確認走行区間コース)を進むことができる
市役所庁舎内フロアマップ
信号あり横断歩道
信号あり横断歩道
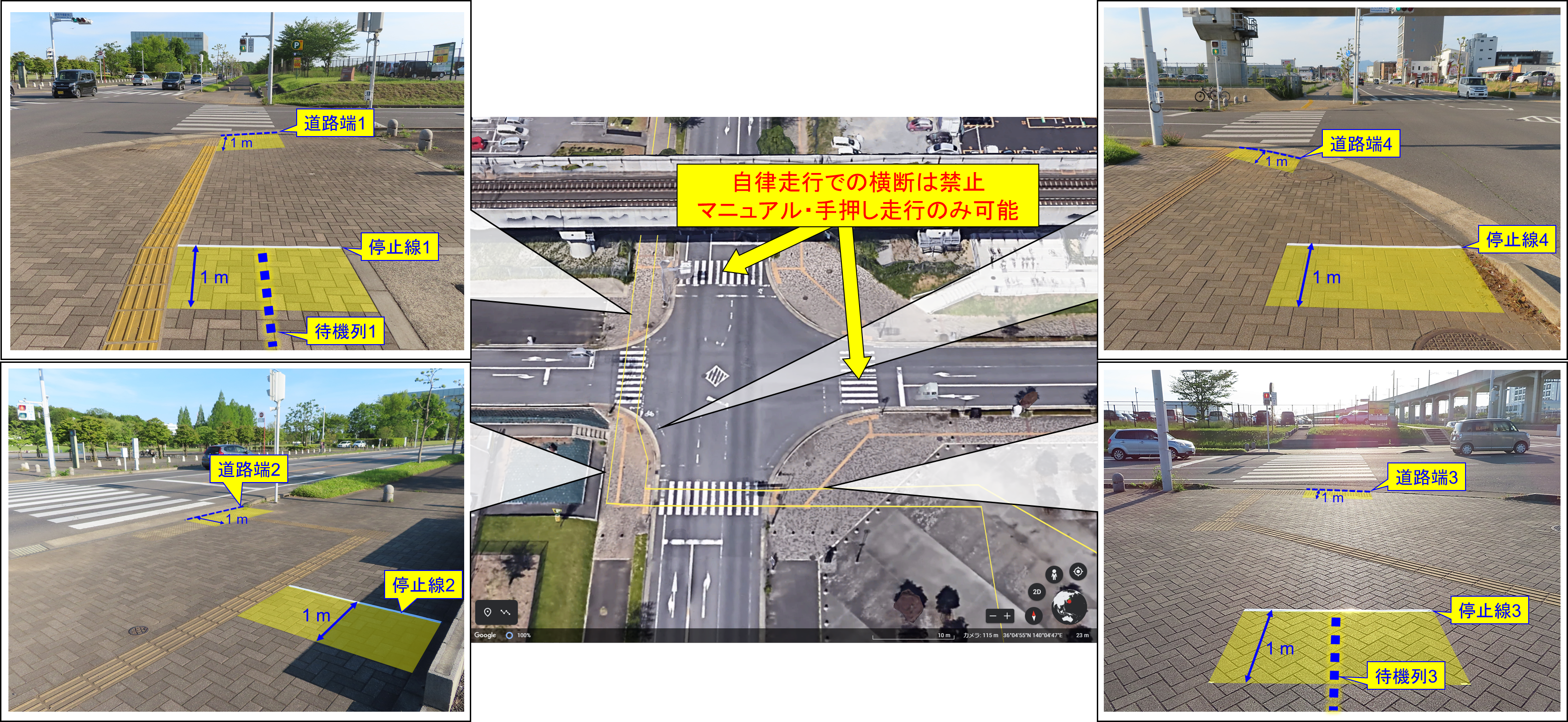
- 待機列:横断歩道を渡る順番を待つための複数台の待機列(待機列を示すガイドとなる白線は設置しない)
- 停止線:待機列の先頭の一時停止位置の基準(白線を設置する)
- 道路端:信号待ちをする一時停止位置の基準(白線は設置しない)
待機列の並び方
- 自律走行で横断するすべてのロボットは、横断歩道手前の停止線を先頭に、待機列に一列に並ぶこと
- 停止線では、手前 1 m 以内で自律的に一時停止すること
ただし、特例として停止線2と4については、次の道路端に他のロボットがおらず、かつ次の信号が青になる前に道路端に到達できると判断した場合には、停止線を通過して道路端まで進んでもよい - 停止線の先頭で停止しているロボットは、交通整理をする委員の指示に従って、オペレータ操作により走行再開すること
走行再開したロボットは、道路端の手前 1 m 以内まで進んで、再び自律的に一時停止すること - 待機列では、後続のロボットは前のロボットを追い越さないように一列に並んで待機すること
列に待機しているロボットは、前のスペースが空いたら前進すること
- 停止線では、手前 1 m 以内で自律的に一時停止すること
- データ取得や単なる移動などのためにマニュアル走行や手押し走行で横断する場合は、待機列に並ばずに進んでもよい
他のロボットや周囲の人の通行を妨害しないように注意し、オペレータの判断で横断すること
横断歩道の渡り方:信号認識横断(選択課題B)
- 歩行者用信号機が青になり、かつ横断歩道上に車両がいないことを確認したのち、横断を開始すること
- 横断可能な(青信号で車両が横断歩道上に残っていない)状況の2回目以内に横断すること
選択課題Bを実施する場合
- 選択課題Bを実施するロボットは、歩行者用信号機と交差点内の安全を認識し、自律的に走行開始して横断すること
- 道路端で一時停止後、赤信号で横断を開始してしまった場合は、直ちに非常停止スイッチを押下すること
- 道路端を超える前に停止できた場合は、選択課題Bは失敗だが、自律走行は継続可能
- 道路端を超えてしまった場合は、選択課題Bおよび自律走行のいずれも失敗とする
- 青信号だが車両が横断歩道上に残っている状況で横断を開始してしまった場合は、直ちに非常停止スイッチを押下すること
- 選択課題Bは失敗だが、自律走行は失敗とはせず、非常停止した位置または手前の道路端まで戻した位置から走行再開させる
- 横断可能な(青信号で車両が横断歩道上に残っていない)状況で横断を開始しない場合は、2回目の試行まで許可する
- 2回目も横断を開始しない場合は、選択課題Bおよび自律走行のいずれも失敗とする
- 2回目はオペレータ操作での走行開始に切り替えてもよい(選択課題Bは失敗)
- 往路と復路で各2回の合計4回のすべてにおいて自律的に横断できた場合に、選択課題Bの成功とする
選択課題Bを実施しない場合
- 選択課題Bを実施しないロボットは、オペレータが横断可否を判断し、オペレータ操作により走行開始して横断すること
補足事項
- 右折や左折で進入してくる車両は、委員が旗で交通整理する
- 横断可否の判断や非常停止スイッチ押下後の走行再開位置は、委員の指示に従うこと
走行再開位置は、非常停止した位置または手前の道路端まで戻した位置とする(待機列の停止線までは戻らない) - 対向横断のロボットと正対して走行が停滞した場合には、安全確保のため直ちに非常停止スイッチを押下し、ロボットを速やかに歩道へ退避させること(選択課題Bは失敗とするが、必ずしも自律走行の失敗とは判断しない)
- 歩行者用の青信号の点灯および点滅の間に、横断を完了していなければならない
- 青信号での横断が不可能と判断した場合は、非常停止スイッチを押下し、ロボットを速やかに歩道へ退避させること(選択課題Bおよび自律走行のいずれも失敗とする)
- ロボットが横断歩道を通過するのに要する時間を、あらかじめ確認しておくこと
オペレータはこの時間に基づき、横断の時間的余裕を把握すること
- 安全管理責任者は、横断歩道を渡る際に右左折車の確認を行い、手を挙げるなどしてドライバーに注意を促すこと
チームメンバーが交通の妨げとならないよう注意喚起すること - 1回の青信号で同じ方向で横断歩道に進入するロボットは1台とする
- 停止線1と3において、交差点の南西側に先行するロボットが停滞している場合には、停止線で待機してもらうことがある
公園
- 公園外周の歩道および公園内の歩道・広場・階段を走行できる
ただし、芝生(コース地図で緑色に塗られた領域)や走行禁止エリア(コース地図で赤色に塗られた領域)に進入してはならない - 公園の北西側の広場(コース地図で黄色に塗られた領域)を配送エリアと呼ぶ
- 折り返し地点を通過すること(全ロボット対象)
チェックポイント通過+経路封鎖迂回(選択課題C)
チェックポイント通過
- 選択課題Cを実施するロボットは、指定されたチェックポイントをすべて通過すること(目安として半径 5 m 以内程度)
停止する必要はなく、また交差点に入ってきた道に引き返して出てもよい - 公園内の交差点を、チェックポイント候補点とする(コース地図参照)
- チェックポイントとする番号は、実験走行日ごとに変更して前日に通知する(連続日は変えない)
本走行日は、前日の実験走行日とは異なるチェックポイントとする - チェックポイントは5ヶ所程度(全ロボットで同じ)で、通過の順番や間の経路は自由
- チェックポイントには、緑ロードコーンを設置して番号を表示する
チェックポイント例

経路封鎖迂回
- 選択課題Cを実施するロボットは、途中で遭遇した経路封鎖看板を検出して別の経路に迂回すること(経路封鎖の位置は通知なし)
経路封鎖を無視して通過したり、芝生に進入して経路封鎖を回避した場合は、選択課題Cの失敗とする(他の課題は継続できる) - 経路封鎖看板の設置で経路封鎖を表す
- 看板:スタンドプレート SP-901(イエロー)
- 印刷デザイン:イラストレータ形式、PDF 形式
両サイドに再帰反射テープを貼付
- 公園内の歩道に5ヶ所程度を設置する
- チェックポイント候補点(交差点)をつなぐ道ごとに1ヶ所以下
- 看板を2個、外側端を歩道の端と重ねて設置する
経路封鎖看板フラッシュ撮影

| 5 m 道幅 | 3 m 道幅 | 2 m 道幅 |
|---|---|---|
 |
 |
 |
荷物の配送(選択課題D1, D2)
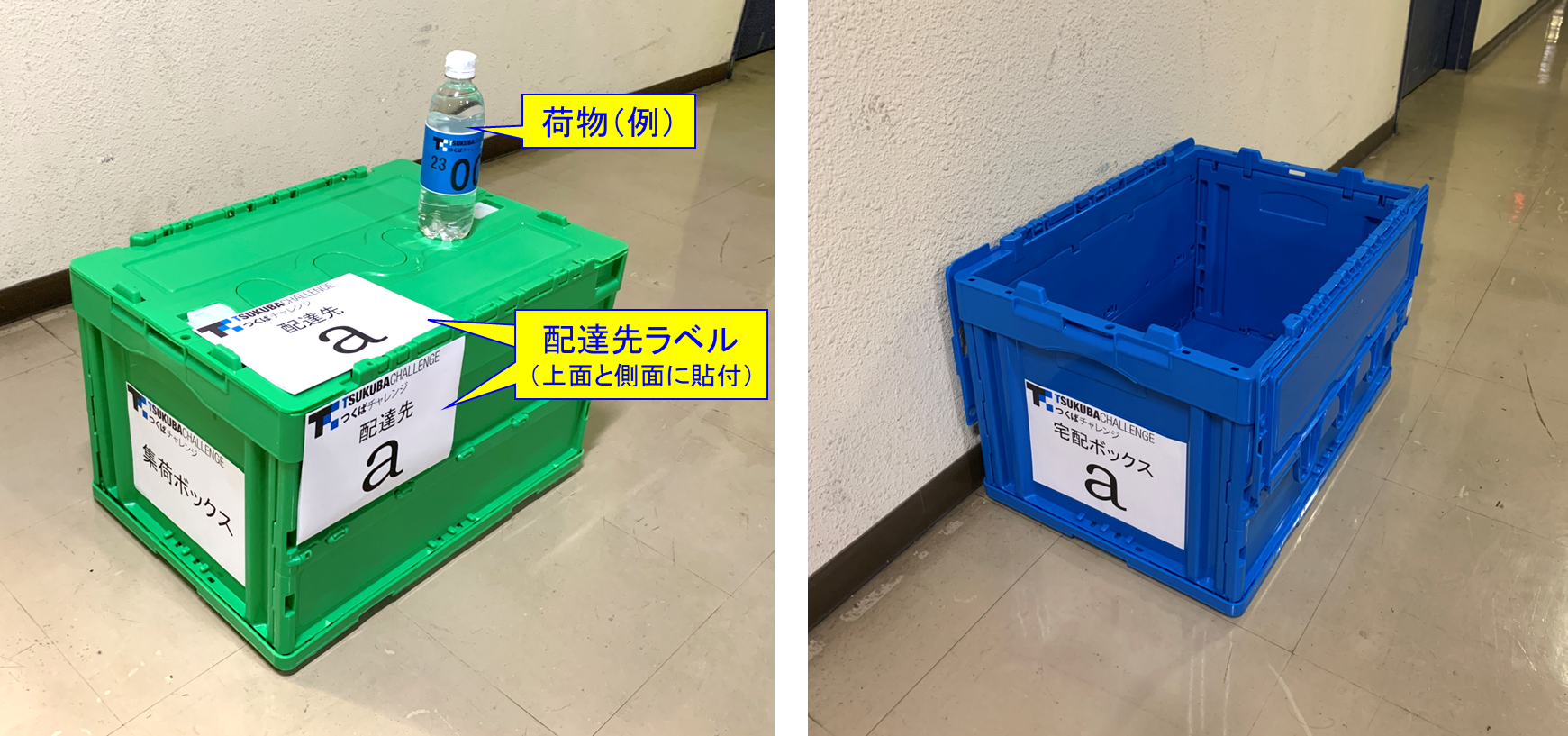
- 公園内の配送エリアに、集荷ボックスと3ヶ所の宅配ボックスa,b,cを配置する
- 選択課題D1を実施するロボットは、集荷ボックスに接近・停止して配達先を認識したのち、指定の宅配ボックスに接近・停止すること
- 選択課題D2を実施するロボットは、D1において、集荷ボックスに置かれた荷物をロボット自身が回収し、指定の宅配ボックスに入れること
- ロボットが集荷ボックスに接近する度に、配達先ラベルa,b,cのうち1ヶ所がランダムに設定される
- 配達先ラベルは集荷ボックスの上面と側面の左側2ヶ所に設置する
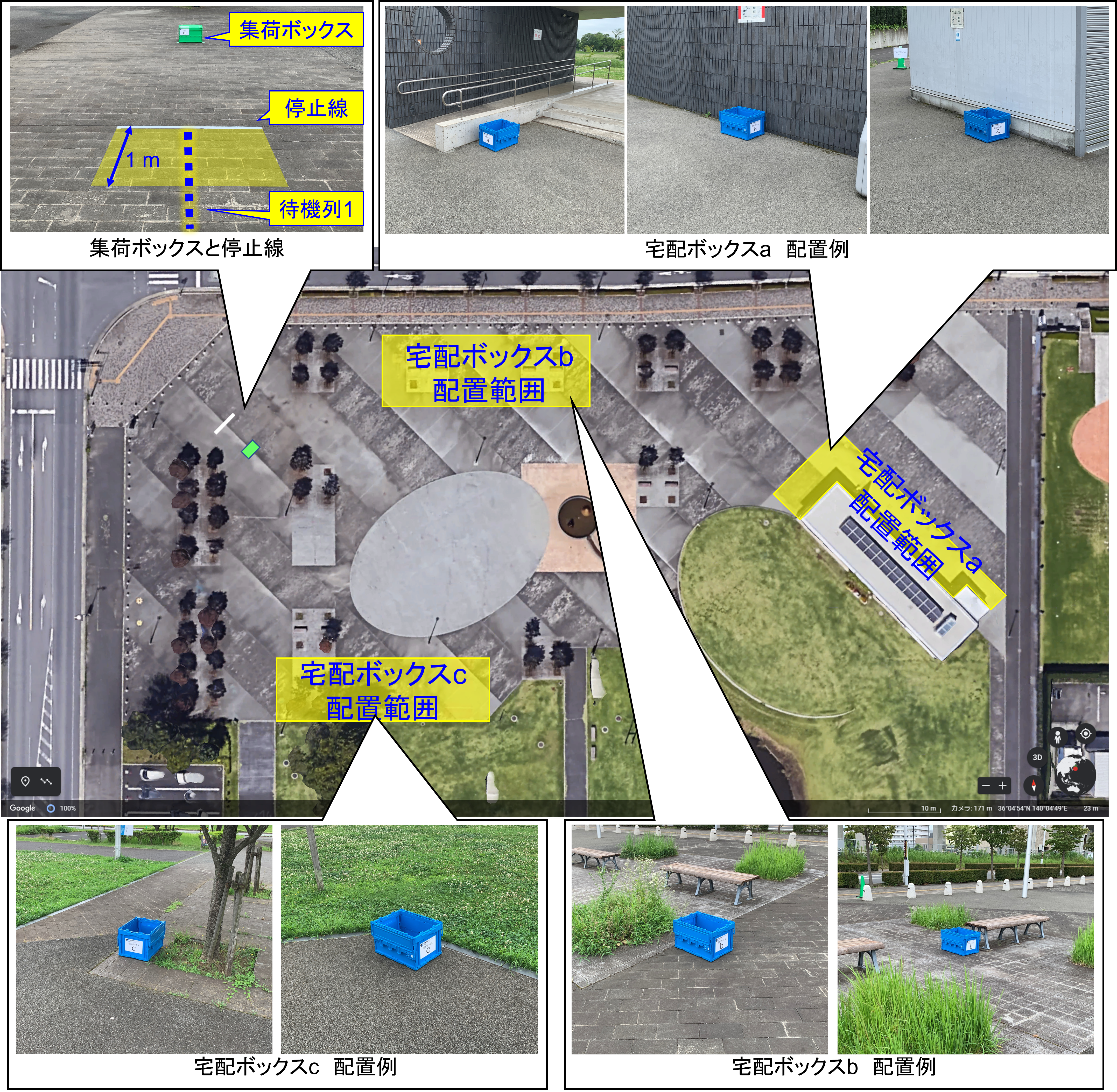
- 集荷ボックスの手前に待機列の停止線を設置する
- 集荷ボックスの位置は固定されている
- 宅配ボックスa,b,cの位置は配置範囲の中でランダムに置かれている
- 集荷ボックス FCWF50-GR
- 集荷ボックス側面ラベル
- 配達先ラベル a, b, c
- 宅配ボックス FCWF50-BL
- 荷物
- 選択課題D2を実施するチームは、配送用の荷物を用意すること
- 荷物の形状、重量、素材、デザイン等は、以下の仕様を満たす範囲で各チームが自由に決めてよい
- 縦横高さ三辺の長さを足して 23 cm 以上であること
- 容易に風で飛ばされない形状と重量であること
- 人やボックスを傷つけないこと
- チーム番号を記載すること
集荷ボックスと宅配ボックス
集荷ボックス・宅配ボックスの配置例
集荷地点と配達先への訪問(選択課題D1)
- 選択課題D1を実施するロボットは、集荷ボックス手前の停止線を先頭に、待機列に一列に並ぶ
- 停止線では、手前 1 m 以内で自律的に一時停止すること
- 停止線の先頭のロボットに対して、委員が集荷ボックスに配達先ラベルを設置する
- 停止線の先頭のロボットは、委員の指示に従い、オペレータ操作により走行再開し、集荷ボックスに接近して3秒間以上停止する
- ロボットが集荷ボックスに提示された配達先ラベルを認識したのち、速やかに移動を開始する
- 集荷ボックスに接近後、90秒間以内に離脱を開始すること
集荷ボックス前に90秒間を超過してとどまった場合、選択課題D1は失敗とする
- 集荷ボックスに接近後、90秒間以内に離脱を開始すること
- ロボットが配達先ラベルに記載された指定の宅配ボックスに接近して3秒間以上停止する
- 集荷ボックスや宅配ボックスへ接近・停止した際に、ボックスからロボット本体までの最短距離が 50 cm 以内であること
- 指定外の宅配ボックスに接近・停止した場合、選択課題D1は失敗とする
荷物の回収と配達(選択課題D2)
- 選択課題D2を実施するロボットは、集荷ボックス手前の停止線を先頭に、待機列に一列に並ぶ
- 停止線では、手前 1 m 以内で自律的に一時停止すること
- 停止線の先頭のロボットのオペレータが委員に荷物を渡す
- 委員が集荷ボックスに受け取った荷物と配達先ラベルを設置する
- 停止線の先頭のロボットは、委員の指示に従い、オペレータ操作により走行再開し、集荷ボックスに接近する
- ロボットが集荷ボックスに置かれた荷物を回収し、さらに提示された配達先ラベルを認識したのち、速やかに移動を開始する
- 集荷ボックスに接近後、90秒間以内に離脱を開始すること
集荷ボックス前に90秒間を超過してとどまった場合、選択課題D2は失敗とする
- 集荷ボックスに接近後、90秒間以内に離脱を開始すること
- ロボットが配達先ラベルに記載された指定の宅配ボックスに接近し、荷物を入れる
- 指定外の宅配ボックスに接近・停止した場合や荷物を入れた場合、選択課題D2は失敗とする
- 選択課題D2に成功した場合、選択課題D1も成功したとみなす(D2の成功のみで選択課題の2項目成功となる)
- 選択課題D2に失敗した場合でも、選択課題D1の条件(3秒間以上停止)を満たす場合は選択課題D1は成功とする
補足事項
- 集荷ボックスへ接近できるのは1回のみとする
- 選択課題D2を実施する場合
- ロボットが荷物に触れている場合は、荷物もロボットの一部とみなす
- ロボットが停止している状態であれば、荷物の回収と配達のために、一時的にロボットが既定のサイズを超過してもよい
- 安全チェックの際に、荷物の回収と配達に使用するアクチュエータの安全性と荷物が規定を満たしているかを委員が確認する
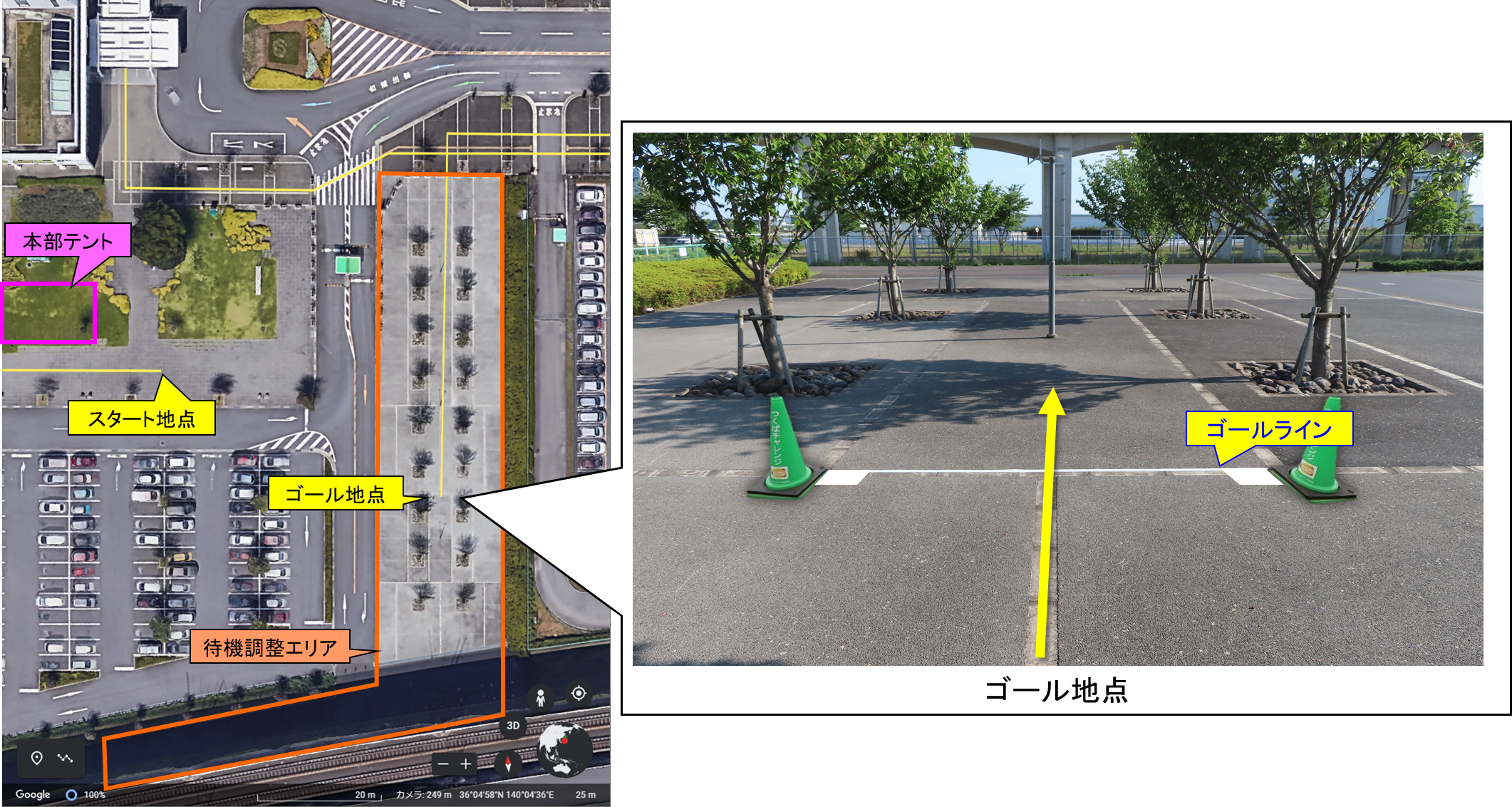
ゴール地点
- ゴール地点は待機調整エリアに配置する
- ロボット本体が完全にゴールラインを越えたら、自律的に停止すること
ゴールの配置