つくばチャレンジ2014の課題
課題
移動ロボットがつくば市内の遊歩道や広場を自律的走行して、複数の探索エリアで、決められた服装の人間を見つけてくること。
ロボットは走行開始後、自分で環境の条件に対処し、外から制御を受けることなく完全に自律的に動作しなければならない。
ロボットは走行中、通行人や環境内に一時的に存在する障害物、あるいは、走行中の自転車や他のロボットに対処し、それらとの接触や衝突を発生させないこと、また、あるいは市民の通行の妨害および、市民の安全を脅かしたり、不安感を与えることも避けなければならない。
つくばチャレンジ2014の課題の要点
つくばチャレンジは人々が普通に暮らしている環境の中をロボットが自分で自由に走行する為の技術を目指しています。したがって、ロボットは与えられた環境の中で一時的に存在する物体、走行する自転車、あるいは、他のロボットの存在などへ自律的に対処出来なければなりません。この条件は、つくばチャレンジの第1ステージおよび、つくばチャレンジ2014でも同様に設定されていました。しかし、この条件は技術的に極めて難しいので、今までは条件が厳しくなりすぎないようコースが設定され、また実際には条件をある程度は緩めて運用されていました。
一方、ロボットが市民の中で確実に働くためには、ロボットのそのような能力が極めて重要です。そこで、つくばチャレンジ2014では、ロボットがこのような普通の条件の下でしっかりと働くことを重視します。その為、見かけ上の課題は昨年度(つくばチャレンジ2013)と大きくは変わりませんが、この能力の発揮を求める課題とし、運用をします。
この課題の達成のためには、実験時といえども安全性に対する配慮がきわめて重要です。つくばチャレンジ2014は、昨年度まで以上に、安全の確保を重視して実施します。
課題コース・探索エリア(コース地図参照)
- 会場は、つくば駅近辺(大清水公園~ペデストリアンデッキ~つくばセンター広場)とする。
- ロボットは、決められたスタート点から、市内の大清水公園の中と遊歩道に決められたコースを走行して、順々に指定された探索エリアを訪問し、その中を走り回って探索対象の人間を発見する。ロボットは必要な探索が終わったら決められたコースに沿ってゴール点まで走行する。
- スタート点とゴール点は、いずれも大清水公園の南端部(つくばカピオの正面広場付近)とし、つくば市内の遊歩道、つくばセンター広場、および、大清水公園にコースを設定する。
- 探索エリアは複数とし、各探索エリアを、
第1探索エリア:大清水公園
第2探索エリア:つくばセンター広場、フォーラム周辺
第3探索エリア:つくばセンター広場、フォーラム北側およびホテルオークラアネックス周辺
に設定する - ロボットが走行すべき距離は、探索のための走行を除いて約1.2kmである。
(注)「探索エリアを通り…」の条件について
探索エリア毎に入り口と出口のラインを定め、ロボットがそのラインを通過することをもって、探索エリアを通ったと判定する。
コース地図
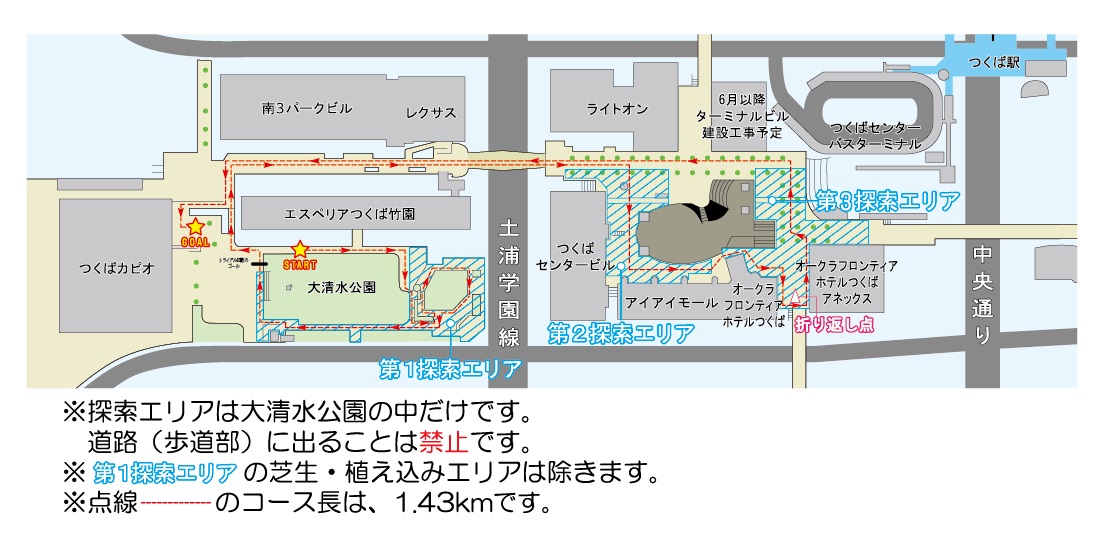
つくばチャレンジ2014 課題コースと探索エリア(図をクリックすると拡大できます)
(※2014/5/19 修正。コースを若干変更します。)
(※2014/7/30 一部修正。第1探索エリアを縮小しました。)

つくばチャレンジ2014 第1探索エリア(図をクリックすると拡大できます)
課題コース紹介(映像)
つくばロボット特区で実験中のセグウェイのハンドル(地上約1.2m)にカメラを固定して、課題のコースを探索はせずに走行して撮った映像です。
撮影:6月13日(金、晴天)の午後2時頃
持ち時間
ロボットの走行の持ち時間はスタート後90分とする。
探索対象
1.探索対象の人
探索対象とする人間は、原則として椅子に座っていることとするが、時間と共に移動することはある。(夏は日向を避けたり、秋は強風を避けたりするためにも移動する。)が、頻繁な動きは避けるものとする。なお、つくばチャレンジ2014においては、探索対象の人は、つくばチャレンジ2013と同じく予め決められた目立った色のジャンパーや帽子のほかを着用することとし、探索対象の人の服装は予め公表する。
また、同一の探索エリアに複数の探索対象のいる場合は、各々異なる帽子やジャケットを着用することとする。つくばチャレンジ2014においては、探索対象の人は、回帰反射テープが貼ってあるジャケットを着用することとする。
2.各々の探索エリアの探索対象の人数
・第1探索エリア:1人
・第2探索エリア:2人
・第3探索エリア:2人
の計5人。
(※2014/07/29変更 第1探索エリアの探索対象人数を2人から1人としました。)
3.探索対象を示す、パネル等
つくばチャレンジ2014においては、探索対象の人の脇には、立て看板、または、パネルを置く。そのデザインは予め公表する。
4.探索対象を発見した時のロボットの行動
ロボットは、対象の人を見つけたら、その人の前で3秒間以上停止して見つけたことを態度で示すものとする。
(注)運用上は、ロボットが本当に探索対象の人を見つけたか否かに拘わらず、ロボットの一部が、探索対象の人の1.5m以内のところに達して、そこで3秒間以上停止したことをもって、探索対象の人を見つけたと判断する。探索対象の人は、見つけられたと判断した時、記録を残す。
ロボットは探索対象の発見場所と時刻を記録し、参加チームはロボットの走行終了後その記録を提出する。位置等の表現方法・フォーマットは自由とする。この情報は公開される。
ロボットを走行させるための条件
(※2014/07/30修正 確認走行の名称等の説明を変更しました。)
- 市民の安全の確保、および、一般の人に迷惑をかけないための方策
走行させるロボットについて、安全のための遵守事項を定める。この遵守事項を満たしているロボットのみが動力による走行を行うことができる。また、ロボットを走行させる時は、必ず、非常のための安全・操作要員(ロボットのオペレータ)と安全管理責任者(計2名)が随行する。 なお、遵守事項では、当面、ロボットの重量の制限を100kgとするが、安全のために60kg以下を推奨する。(60kg以下なら非常時に2名で持ち上げることができるため。) - 遊歩道とつくばセンター広場の走行をするための条件
課題コースのうち前半の大清水公園内の区間をトライアル区間とし、このトライアル区間の自律走行を達成したロボットのみが、その後の遊歩道、つくばセンター広場の区間の自律走行実験を行えるものとする。このトライアル区間の自律走行の達成のチェックを確認走行と呼び、各実験走行日に行う。もちろん、この確認走行においても、コース上に障害物や他のロボット、通行人がいることはあり、ロボットはそれらに対して着実に対応できなければならない。なお、一旦確認走行でトライアル区間の自律走行の達成が認められたロボットは、つくばチャレンジ2014期間中有効である。 - ロボット走行時の随行の制限
本走行時には、非常時のための安全・操作要員(ロボットのオペレータ)と安全管理責任者(計2名)を除いて、ロボットに随行することを禁止する。本走行においては、ロボット開発チームのメンバーは上記2名の他はロボットから5m以内に近づいてはならない。
(注)この条件の理由は、ロボットは自律して走行しなければならないのに、その側近に多くの見守っている人がいると自律していないように見えるからである。
本走行結果の公表と課題達成の認定
つくばチャレンジは競技・競争ではないので、順位をつけることはない。
ただし、つくばチャレンジ2014の本走行の結果は、つくばチャレンジ実行委員会で確認して、自律的に走行した区間(スタートからどこまで走行できたか)と発見した探索対象の数、および、必要なコメントを添えて公表する。また、次の3レベルについて認定証を発行し、正規の結果として記録する。
- トライアル区間の自律走行達成
- 課題コースの自律走行達成:探索対象(の一部または全部)が発見できなくても、スタートからゴールまで全ての探索エリアを通過するコースの自律的な走行を達成。
- チャレンジ課題達成:本年度の課題を完全に達成。達成チームにはつくば市長による表彰も計画されています。
(注)探索対象の発見の報告(探索対象の4.参照)における探索対象物の個数(ロボットが発見したと認識した個数)が存在する探索対象物より多い場合(すなわち、ロボットによる認識の誤りがある場合)も、すべての探索対象が発見されていれば課題達成と判定する。(ただし、誤った認識があったことは、公開される情報に含まれることになる。)
ロボット等の条件
1.ロボット
参加するロボットは、バッテリーや走行機能、センサ、情報処理機能、外部との通信機能などを全て内蔵した自立ロボットとする。ロボットには、市民や環境の安全のために遵守事項として重量や走行速度(時速4km以下)、および、突起物がないなどの形状の制限が課せられる。
2.ロボットの動作(自律行動の原則)
ロボットは、予めロボットに搭載された情報と実時間でセンサなどにより取得した環境情報にしたがって、自律的に走行する。 ロボットの開発者は、ロボットの走行開始に先立ち、ロボットのハードウェアとソフトウェア、および、必要なデータを準備してロボットに搭載する。ロボットは、走行開始後はゴール点について自ら停止するまで、開発者やオペレータのコントロールを一切受けることなく、完全に自律的に行動しなければならない。
環境の条件(リアルワールドの原則)
ロボットが走行すべき環境は、探索対象の人がいることを除けば、つくば市内の市民が通常使っている、あるがままの遊歩道や広場・公園の環境である。この環境では、ロボットが走行するために既存の物の位置を変える等の操作は一切行わないことを原則とする。走行当日の環境の状況、すなわち、天候や通行人やコース上の放置されたもの等の詳細は、予め知ることはできない。ロボットは、その状況によらず、課題を自律的に達成しなければならない。ロボットは、(市民に迷惑をかけない限り)そこに住む市民のために予め設置されている道路や標識、あるいは、設備は使うことができる。が、ロボットのために環境に何らかの準備を加えることは許されない。たとえば、ロボットの存在に無関係に準備されているGPSの信号の利用は自由であるが、ロボットのために疑似GPS をおくことは禁止される。また、公衆の携帯電話回線やWi-Fi等の公衆ネットワークサービスは利用できるが、ロボット本体上以外に環境側にルータなどの補助機器を設置することはできない。 ロボットは、既設のインターネット(クラウド)上の各種のサービスを使うことは許される。しかし、開発者やその関係者がロボットのためのサービスをインターネット上に準備することは禁止される。
なお、つくばチャレンジの安全な運営のために、環境には、 実験中の看板を出したりコース管理担当者を置くなど、若干手が入る可能性があるが、それも、出来る限り避ける。
推奨する事項
1.ロボットの位置や状況のステーションにおけるモニタリング(強く推奨)
スタート点付近にロボット状態モニタリングステーションを準備し、誰もがロボットの現在位置や時々刻々の状況を知ることができるようにすることを推奨する。本走行日には、それを公開するため、スタート・ゴール点付近に、モニターやディスプレイを置く机を準備する。
ここで、ロボットとステーション間の通信は、公衆向けの携帯電話回線(3G やLTE などを含む)や、WiFi など、あるいは、一般に利用が許されている微弱電波等の通信回線を利用する。(この場合も、必要な通信基地は、モニタリングステーションにおくこと。一般の環境内に中継器等をおくことは許されない。)なお、専用の回線を用いる場合は、他のロボットや、場合によっては市民も同じ帯域の通信を利用している可能性を考慮し、他人の邪魔をして迷惑をかけないよう配慮が必要である。
なお、このモニタ機能により、ロボットからステーションへの通信が確保されても、ステーションからロボットの動作を制御したりロボットにパラメータを送信することは許されないので注意すること。
2.市民へのサービスの試み
ロボットには、ロボットの存在が市民の便利につながるようなサービスの機能を搭載することを推奨する。(例として、何らかのニュースの表示、パンフレットの配布、ゴミ箱の搭載などが考えられる。)このサービス機能は、原則として何も知らない初めての市民が使うことを想定して考え、必要な機能をデザインすることが望ましい。ただし、この機能を搭載する場合は、市民の安全について一層の注意・配慮が必要である。
つくばチャレンジにおける通行人や見物者の安全の確保のための非常停止について
(自律走行の原則に対する例外の取り扱い)
市民の安全の確保を徹底するため、つくばチャレンジ2014では、本走行(及び、記録走行)におけるロボットの非常停止スイッチの操作を、次のとおり運用します。
1.市民の安全確保、および、そのための非常停止
つくばチャレンジにおいては、市民のいる環境の中でロボットに自律的な行動をさせる実験を行うため、
- ロボットに非常停止ボタンを準備すること
- オペレータがロボットに随走して、必要に応じてこれを停止させ、危険な事象の発生を防止すること
を求める。
ただし、オペレータがロボットの非常停止ボタンを操作することは、「自律性の原則」に反するため、原則としては、その時点でロボットの自律行動は失敗と判断される。
2.安全のための「自律性の原則」に対する例外の取り扱い
ロボットの走行実験を行う上で、もっと優先するべきことは、市民、あるいは、周りにいる人たちの安全であり、安全のためには早めの積極的な非常停止の操作が必要である。しかし、ここで、非常停止スイッチの操作をロボットの自律行動の失敗と判断することにすると、オペレータにその操作を躊躇させる恐れが発生する。
そこで、それへの対処として、
-
オペレータは、危険のおそれを察知した時、即座に停止スイッチによりロボットを停止させ、危険な状況が解決した後に行動を再開させることとし、この場合は「自律性の原則」の例外として取り扱うこととする。