これらの事項は、本走行日だけでなく、実験走行日にも遵守が求められる。また、自律走行時に限らず、データ取得などのためのリモコン走行時にも遵守すること。
サイズ、重量
- 全長:1.2 m 以下
- 全幅:0.75 m 以下
- 全高:0.6 m 以上、1.5 m 以下
- 重量:100 kg 以下(60 kg 以下を推奨)
走行速度
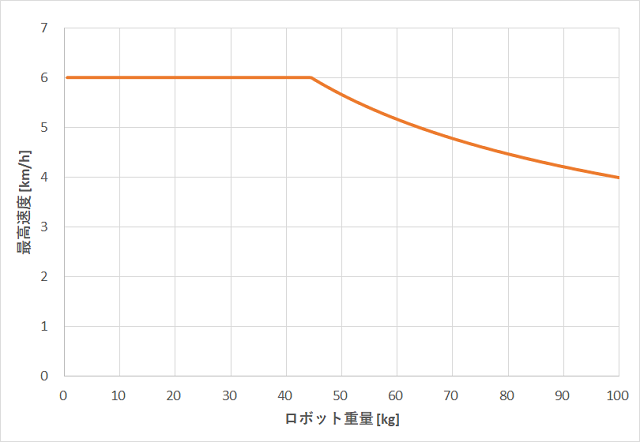
- 最高速度:100 kg かつ 4 km/h と同じ運動エネルギーとなる速度または 6 km/h のうち小さい値を上限とする
- 100 kg の場合:4 km/h
- 60 kg の場合:5.2 km/h
- 44.4 kg 以下の場合:6 km/h
- 自律走行での 4 km/h 超過は、確認走行達成済みのロボットのみとする
- リモコン走行での 4 km/h 超過は、確認走行未達成でも良い
- 4 km/h 超過して良い場所は、課題ページ(コース地図)の「最高速度 6 km/h 許可エリア」内に制限する
- 誤動作しても、最高速度を超過しないこと
- 自律走行時にも、歩行者などの近くでは安全な相対速度や距離を取ること
例:障害物を LIDAR で検出して減速・停止、常時低速 ○ km/h で走行、リモコン走行のみ、など
外装
- 危険な突起部を有しない形状であること
- 人の手や足などを巻き込む恐れのない構造であること
- 高温あるいは感電の恐れのある露出部を有しないこと
- 一般の通行人(や他のロボット)から見えやすい形状と色であること
- 歩行者や自転車との衝突などの事故を予防するため、遠方からでも気付かれやすいことが望ましい
- 他のロボットに衝突される危険性を低減するには、相手のセンサによって検出されやすいことが望ましい
周囲とのインタラクション
- 周囲の人にロボットの走行速度や挙動を伝える機能(音や光など)を有することが望ましい
- ロボットが発する騒音や振動は、一般に許容される程度までに収めること
非常停止スイッチ
- 走行を確実に停止する非常停止スイッチを搭載すること
- ロボットが誤動作していても、安全に停止できること
- 自作ソフトウェアを介さずに動力供給を断ち停止させる方式などで確実に機能すること
- 分かりやすい位置に設置されており、オペレータ以外にも操作可能なこと
- 非常停止の後、オペレータによる簡単な操作で自律走行を再開できること
- 非常停止した状態で、手押しによって容易に移動できること(ブレーキ解除クラッチを備えるなど)
リモコン走行
- 無線通信で操作せず、有線でゲームパッドなどをロボットに接続すること
- 無線によるタブレットなどでのモニタリングは問題ない(操作は禁止)
ナンバープレート
- 規定のナンバープレートを取り付けること
- サイズ:縦 11 cm × 横 13 cm(フォーマットの大きさを変更しないこと)
- 取付位置:前後左右の内、前方を含む2~4ヶ所、地上 0.2 m 以上の高さ
- データ取得用の実験台車などにも、所属チームが分かるようにナンバープレートを取り付けること