つくばチャレンジ2016の課題
つくばチャレンジ2016の課題
移動ロボットがつくば市内の遊歩道や広場に定められたコースを自律的走行して、途中の探索エリアで、決められた服装の人間を探索し見つけること。
ロボットは走行開始後、自分で環境の条件に対処し、外から制御を受けることなく完全に自律的に動作しなければならない。
ロボットは走行中、通行人や環境内に存在する障害物、あるいは、走行中の自転車や他のロボットに対処し、それらとの接触や衝突を発生させないこと、また、あるいは市民の通行の妨害、および、市民の安全を脅かしたり不安感を与えることも避けなければならない。
自律走行するコース
つくばチャレンジ2016では、つくば市大清水公園をスタート(第2ステージの昨年までと同様)とし、つくば公園通り、つくばセンター広場(ここを探索エリアとします)、つくば中央公園、つくば市吾妻小学校前の横断歩道を通って、また大清水公園まで戻る、全長2,177mの以下のコースを、課題コースとします。
つくばチャレンジ2015までのコースと異なる大きな特徴は次のとおり。
1.つくば中央公園西側の信号機のある横断歩道を、自ら信号機を見て通行すること。
ロボットは自ら信号機を見て判断し、横断歩道を渡ることが求められます。また、ここでは、安全のため1回の青信号で渡るのは1台とし、ロボットは列を作って待つこととします。なお、この区間の走行は難易度が高いため、ある程度の技術を有するチーム(ロボット)にのみ、この区間の走行にチャレンジすることを勧めることとし、それ以外のロボットは、この区間をスキップしてゴールまで走行できるよう、コースを設定しています。
2.全体として大清水公園からつくばセンター広場を経てつくば中央公園を往復する2kmを超えるコースであり、多くの区間でロボットは他のロボットと対面してすれちがいが発生すること。
3.人を探索するエリアであるつくばセンター広場では、BiViつくば(つくばバスターミナルビル)の建物内を通過すること。
課題コース説明
つくばチャレンジ2016で、移動ロボットが自律的に走行するコースは次のとおり。
|
|
地点(距離) |
詳細 |
|---|---|---|
|
1 |
スタート(0m) |
つくば市大清水公園東側の、自動販売機横の歩道をスタート点とし、公園内を反時計回りに周回する。 |
|
2 |
大清水公園出口(確認走行ゴール)(260m) |
大清水公園からつくば公園通りの広い遊歩道に出る。なお、この大清水公園の出口を、確認走行区間のゴールとする。 |
|
3 |
つくば公園通り~つくばセンター広場(探索エリア) |
遊歩道を北上し、さくら大橋を経てつくばセンター広場に出る。広場の東側部(楕円形のフォーラムを囲む区域)を探索エリアとする。 |
|
4 |
つくば中央公園 |
センター広場からオークラフロンティアホテルの西側を北上し、吾妻セントラル歩道橋を経て、つくば中央図書館前を通り抜けた後、左折して中央公園に入る。公園内を反時計回りに周回する。 |
|
5 |
横断歩道・折り返し点(1,050m~1,190m) |
中央公園内の周回途中で、一旦右折して公園から出て、吾妻小学校南側の遊歩道につながる信号機付の横断歩道を渡る。吾妻小学校脇で折り返し、再度横断歩道を渡って中央公園に戻る。 |
|
6 |
中央公園~つくばセンター広場・BiViつくば(1,190m~1,700m) |
中央公園を周回したあと、再度つくば公園通りの遊歩道に戻り、つくばセンター広場に向かって南下する。センター広場では、西側にあるBiViつくば(つくばバスターミナルビル)の2階の自動扉を通って、その中を通り抜ける。 |
|
7 |
ゴール(2,177m、 |
つくばセンター広場とつくば公園通りを南下し、大清水公園に戻る。大清水公園入口のつくばカピオ前をゴールとする。 |
[注]BiViつくばに出入りする際は、自律的に開閉を認識してこのビルの自動扉を通り抜けること。なお、この自動扉はスライドするガラス戸ですが、安全の確保のため、高さ60cm以下の所には色つきのクッション材を貼る事とします。
<課題コース地図>
・つくばチャレンジ2016_コース図

・探索エリア拡大版_つくばセンター広場で実験を行う場合の注意
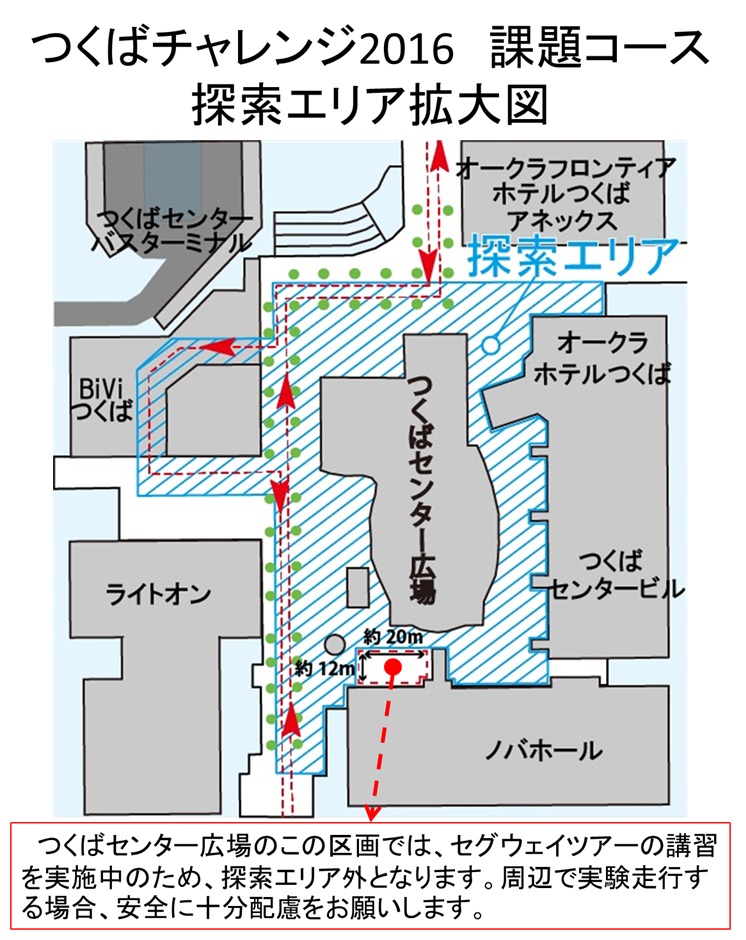
探索エリア拡大版_つくばセンター広場で実験を行う場合の注意(ダウンロード用PDF)
<課題コース映像>
モビリティロボット実証実験として活用しているセグウェイのハンドル(地上約1.2m及び約0.5m)にカメラを固定して、課題のコースを探索はせずに走行して撮った映像です。
撮影:2016年6月17日(金)
探索エリアと探索対象
課題コースの途中の、つくばセンター広場(楕円形のフォーラムを囲むエリア)の定められた領域を探索エリアとする。探索の対象は予め決められた服装の人(4名)とし、このエリア内で椅子に座っているとします。もちろん、ロボットは自ら走り回って対象を見つけなければなりません。
服装が予め決められているとは言え、あるがままの環境の中で天候条件等によらず探索の対象とする人を自律的に認識するのは容易ではありません。したがって、つくばチャレンジ2016の課題でも、いたずらに対象を見つけること自体が難しくなることは避けるよう配慮します。
人の探索
[1] 探索エリア
つくばセンター広場のフォーラムを囲む領域とBiViつくば(つくばバスターミナルビル)2階内の通路を探索エリアとします。ここでの人の探索は、つくばチャレンジのコース走行中、往路・復路のいずれで行ってもよいこととします。
[2] 探索対象とその人
探索すべき探索対象の人数は4人とし、探索対象は下に示す予め決められた服装をして椅子に座っている。もちろんロボットは探索対象が探索エリア内のどこにいるかの情報をあらかじめ持つことはできません。それをハッキリさせるため、実験時間中も探索対象は動くことがあります(また、夏は日向を避けたり、秋は強風を避けたりするために移動することもあります)。ただし、探索対象は頻繁な移動は避けることとし、また見つかるのを避けるためにロボットの動きに応じて移動することはしません。
[3] 探索対象の服装、および探索対象を示す看板
つくばチャレンジは、実世界を課題の対象とするので、考え方としては探すべき対象は、服装も分かっていない実際の人間とすべきではあります。しかし、現在の技術によって移動ロボットが実世界を動き回って探索対象を探すことの現実性を考えて、つくばチャレンジでは、探索対象の服装等を以下のとおり限定することとします。
また探索対象の発見を助けるため、探索対象の人の脇には、決められたデザインの立て看板を置きます。
探索対象の服装は、緑色のジャンパー(夏の期間を除く)の上に青またはオレンジ色の安全ベストとし、オレンジ色の帽子をかぶることとする。また看板は、黄色とオレンジ色のデザインとし、高さ約90cmとします。
[4] 実験走行時のマネキン人形の使用について
つくばチャレンジの考え方としては、探索対象は本当の人間とするべきです。しかし、実験走行日に一日中椅子に座っているなどの行為は、人間にとって快適ではなく、またつくばチャレンジに協力いただいている実行委員やスタッフの人数も限られています。
そこで、実験走行の日は探索対象に、一部マネキン人形を使用することとします。ただし、マネキン人形の台数(人数)は2台(人)以下とし、また本走行においては、探索対象は全て人間が務める予定です。
なお探索対象の服装は、夏の期間の実験走行では、暑さを避けるため、緑色のジャンパーは着ず、安全ベスト(青、または、オレンジ)のみ着用としますが、マネキン人形には、夏の期間も本走行と同じ探索対象の服装を着用させることとします。


(写真 1) 探索対象の例



(写真 2)探索対象を示す看板(左)、探索対象の代わりのマネキン人形(中央、右)
[5] 対象を発見した時のロボットの行動
ロボットは、対象の人を見つけたら、その人の前で3秒間以上停止して、見つけたことを態度で示すこととします。
(注1)ロボットが本当に探索対象の人を見つけたか否かに拘わらず、ロボットの一部が探索対象の人の1.5m以内のところに達して、そこで3秒間以上停止したことをもって、探索対象の人を見つけたとして記録します。
したがって、ロボットが探索対象以外の人やものを探索対象と認識しても、それは課題達成の判断(認定)には反映しません。
(注2)ただし、つくばチャレンジ2016では、探索対象以外の人(やもの)を見つけて、そこに停止した回数は、誤認識として記録に残すこととします。
持ち時間
ロボットの走行の持ち時間はスタート後100分とする。