概要
参加チームには、以下のような活動に取り組むことが期待されます。どれかひとつでも良いですし、複数でも良いです。ただし、データセットやシミュレータに取り組む場合も、最終的には実機での自律走行を目指すことを推奨します。これは、つくばチャレンジがリアルワールドでの実機の自律走行を目標としているためです。
- つくばでの実機実験
- 各チーム拠点での実機実験
- データセットの提供や利用
- シミュレータの利用
- ライトニングトーク大会での発表(任意)
- SI 2021 オーガナイズドセッションの予稿執筆と発表(任意)
- つくばチャレンジシンポジウムの参加レポート執筆と発表(原則として必須)
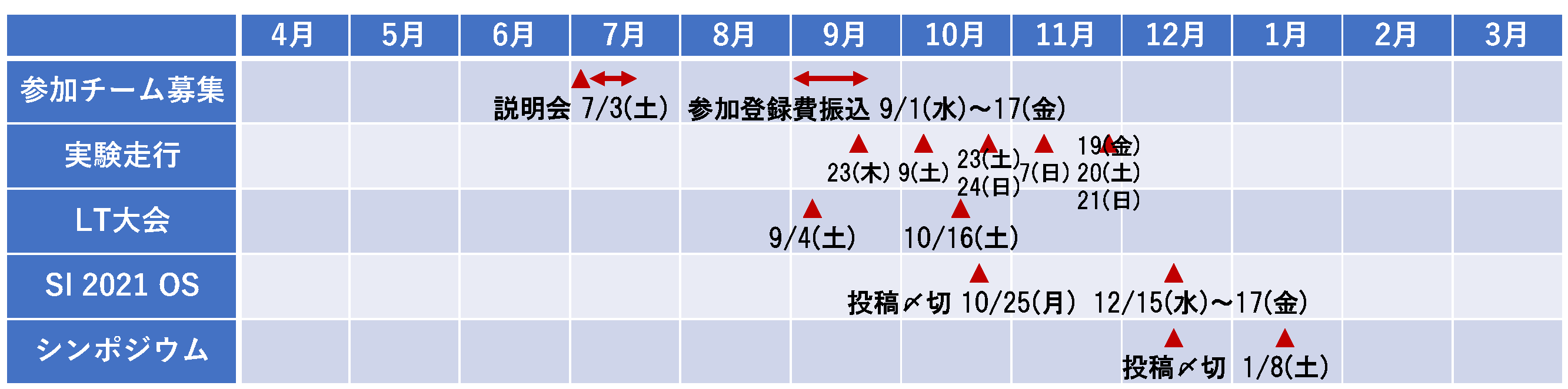
詳細は日程ページを参照
つくばでの実機実験
コロナウイルス感染症対策を取った上で、つくばでの実験走行を実施予定である。詳細は課題ページを参照。
各チーム拠点での実機実験
大学キャンパスなどにコースを設定して、ロボットの実機で自律走行することを想定している。詳細は課題ページも参照。
必須課題
- 自律走行:スタートからゴールまで、1.5~2.0 km 程度の課題コースを設定し、自律走行すること
- コース上に、一時停止位置を数ヶ所設定すること
- コース上に、静止障害物(ロードコーンなど)を複数設置すること
- 設定する課題コースには、以下のような環境を推奨する
- 開けた広い環境と通路などの狭い環境の両方を含む方が望ましい
- 多様な環境を含むように、経路はなるべく重複しない方が望ましい(同じところを何周もするのは非推奨)
- 歩道と車道の境界と同程度の段差の乗り降りを含む方が望ましい
選択課題
- 選択課題A~Dを参照して、自由に設定すること
安全管理
- 遵守事項に則って安全チェックなどを実施すること
- 公道で実施する場合には、道路使用許可を取得する必要があるので、警察に相談すること
実施方法
以下のような内容で実施することを推奨する
- 実際のつくばチャレンジと同様のスケジュールを設定して実施すること
- 実験走行と本走行の日時を事前に設定する
- 実際のつくばチャレンジと同じく、本走行は本番一発勝負とする
- 実施内容を公開すること
- 設定した日時と課題内容(コース)を事前に宣言する
- 本走行の様子を撮影したビデオを共有する
データセットとシミュレータの施策
- データセットとシミュレータは、参加チームに相互協力を頂いて整備を進めていく
実行委員会として作成したりサポートを保証する訳ではない - つくばチャレンジの環境に限定せず、大学キャンパスなどの環境が対象でも良い
- 実機での研究開発につながることが望ましい
データセットやシミュレータを活用した上で、実機実験を行うことを推奨する
データセット
Tsukuba Challenge Datasets
https://github.com/tsukubachallenge/tc-datasets
- Tsukuba Challenge Datasets は、各チームのデータセットへのリンク集である
- 提供されたデータセットを相互に利用して、地図構築(SLAM)や環境認識などの研究開発を推進することが期待される
- 提供されているつくばチャレンジコースの地図ファイルを利用することで、地図構築をせずに自律走行の研究開発に集中しても良い
- GitHub Organization のメンバーは、pull requests などに対応する数人(実行委員会のオンライン担当WGメンバー)
- データセットを提供したいチームは、pull requests で追加を依頼する
- データセットに関する情報を、テンプレートを参考にして書き、pull requests を送信する
- ファイル自体(rosbag など)の置き場は、各チームでオンラインストレージを用意する(Google Drive など)
- データセットの対象は、つくばチャレンジの環境に限定せず、大学キャンパスなどの環境でも良い
また、ロボットで取得したデータに限らず、台車やハンドヘルドで取得したデータでも良い - ライセンスは、提供したチームに帰属する(各チームでライセンスを決める)
一般的に、データセットのライセンスは、Creative Commons とされる場合が多い
- データセットを利用したいチームは、ファイルをダウンロードして利用できる
- 各データセットのライセンスに従って利用すること
- 該当データセットを利用したことを、論文などを執筆する際に明記すること
また、該当データセットで引用すべき論文が記載されている場合は、参考文献として引用すること
シミュレータ
Virtual Tsukuba Challenge (VTC)、Unreal Engine を利用
https://github.com/furo-org/VTC
Virtual Tsukuba Challenge (VTC) on Unity、Unity を利用
https://github.com/Field-Robotics-Japan/vtc_unity
- シミュレータを活用することで、経路・動作・軌跡計画や運動制御などの研究開発を推進することが期待される
- 各チームで独自シミュレータを開発しても問題はないが、開発リソースが分散してしまうので、既存シミュレータの利用を推奨する
また、上記のシミュレータを改善する pull requests などのコントリビューションを歓迎する - シミュレータ上での実験だけで終わらず、実機での研究開発につながることが望ましい
- 各シミュレータのライセンスに従って利用すること
- 該当シミュレータを利用したことを、論文などを執筆する際に明記すること
また、該当シミュレータで引用すべき論文が記載されている場合は、参考文献として引用すること
ライトニングトーク大会
- 参加チームには、発表が期待される(任意)
予稿投稿なし、当日の5~10分間のスライド発表のみ - 参加募集や発表資料の共有などには、connpass を使用する
https://tsukubachallenge.connpass.com/ - オンライン開催(Zoom & Slido)
SI 2021 オーガナイズドセッション
- 参加チームには、予稿執筆と発表が期待される(任意)
- 詳細は SI 2021 の Web ページを参照
つくばチャレンジシンポジウム
- 参加チームには、参加レポート執筆と発表が期待される(原則として必須)
- 詳細はシンポジウムページを参照