目次
- 概要
- 必須課題
- 選択課題
- コース地図
- 自律走行
- 全般
- 注意事項
- スタート地点
- 確認走行区間
- 市役所庁舎内
- 事前走行なしエリア(選択課題A)
- 横断歩道
- 信号あり横断歩道
- 信号認識横断(選択課題B)
- 信号なし横断歩道
- 横断歩道での注意事項
- 横断歩道で非常停止した場合の再開手順
- 公園
- 静止障害物
- チェックポイント通過+経路封鎖迂回(選択課題C)
- チェックポイント通過
- 経路封鎖迂回
- 探索対象発見(選択課題D)
- 探索エリア
- 探索対象概要
必須課題
- 自律走行:スタートからゴールまで、約 2.5 km の課題コースを自律走行すること
選択課題
- A 事前走行なしエリア:市役所庁舎内を、事前走行なしで自律走行すること(本走行のみ走行可)
- B 信号認識横断:信号あり横断歩道を、歩行者用信号と自動車の状況の認識により走行開始して横断すること(往路と復路の両方)
- C チェックポイント通過+経路封鎖迂回:公園内で、複数のチェックポイント(前日に番号を通知)をすべて通過し、かつ通りがかった経路封鎖看板(通知なし)を認識して迂回すること
- D 探索対象発見:公園内の探索エリアで、探索対象である複数のマネキン人形(前日に服装を通知)をすべて発見すること
選択課題の各項目について、本走行のスタート前に実施/不実施を選択して随行委員に申告すること
コース地図
コース全体

公園内(チェックポイント候補点、探索エリア)

- 庁舎東側の大通り沿いにある駐車場出入口との交差部分に設定されている一時停止位置(3ヶ所)には、白線を設置しない
- コースの範囲を示すために設置する緑ロードコーンは、左右どちら側を走行しても良い
- 公園内には走行禁止エリアを設定する
- コース内の階段を走破可能なロボットは走行しても良い
- 本走行では、スタートとゴールを看板やアルミトラスで設置する
自律走行
全般
- スタート地点から、オペレータ操作により自律走行を開始すること
- スタートラインを越えてからロボットを操作した場合は自律走行失敗とする
ただし、一時停止位置での走行再開のためのオペレータ操作などは例外 - 一時停止位置では、停止線や道路端の手前 1 m 以内で自律的に停止すること
また、安全を確認した上で、オペレータ操作により走行再開すること - 公園内の折り返し地点を通過すること
- ロボット本体が完全にゴールラインを越えたら、自律的に停止すること
- 記録走行と本走行では、スタートからゴールまで100分間以内に走行すること
注意事項
- 危険を感じた場合や、走行禁止エリアにロボットが立ち入りそうになった場合は、直ちに非常停止スイッチを押下するなどの操作をして、ロボットを安全に停止させること
- 横断歩道上以外の車道は進入禁止
- 芝生をの上を走行すると植生を傷付けるおそれがあるので、長時間にわたって芝生の上を走行しないこと(一時的に芝生に進入しても、即座に走行失敗とは判断しない)
- デバッグなどの作業を行う際には、歩道を塞がないこと
- 他のロボットや一般の歩行者の通行を妨害しないように注意すること
スタート地点
- 2台同時スタートを全ロボット実施
- スタート位置2ヶ所(並列に2台)は、左右に 4~5 m 程度離れている
- 通常の実験、および確認走行では、スタート位置やタイミングは任意とする
- 本走行でのスタート位置や出走順は、本走行前日に発表する
- 記録走行と本走行では、以下の要件を満たせなかった場合には走行失敗とする
- スタートコール後、1分間以内にスタートラインを越えること
- スタートコール後、2分間以内に 20 m を越えること
- スタートライン手前では、スタートコール後もオペレータ操作が可能
- スタートコール後、隣のロボットが先に移動するのを待っても良い(制限時間1分間以内で)
左スタートと右スタートの配置

確認走行区間
- 課題コースの最初の市役所南側を確認走行区間とする
走行距離は約 250 m、駐車場の出入口の手前まで - 確認走行区間では、安全チェックを認定されたすべてのロボットが自律走行できる
- 確認走行を実施する際には、本部で申請すること
- 確認走行区間をスタート地点から自律走行を開始し、出口に到達して自律的に停止できた場合に、「確認走行達成」と認定する
- 本区間で確認走行達成の認定を受けて認定シールが貼付されたロボットのみが、他の区間で自律走行することを認められる
- 確認走行を達成した際は、走行継続せずに終了し、すべてのナンバープレートに認定シールを貼る
ただし本走行に限っては、確認走行未達成のロボットが区間出口に到達した場合、確認走行区間の先へ走行継続して良い - 認定シールの有効期限は、当該年度の本走行日までとする
市役所庁舎内
コースを以下の2通りから選択
- 事前走行なしエリア(選択課題A)
- 市役所庁舎内コースを、事前データ取得なしで走行する
- 市役所庁舎内コースは、本走行のみロボットの進入を許可する
- 確認走行達成済みのロボットのみ挑戦できる
- 新型コロナウイルス感染症の蔓延状況に基づき、走行の可否は直前に通知する
- 市役所庁舎内を走行しない(通常のコースを走行)
- 屋外の確認走行区間コースを走行する
事前走行なしエリア(選択課題A)
市役所庁舎内フロアマップ
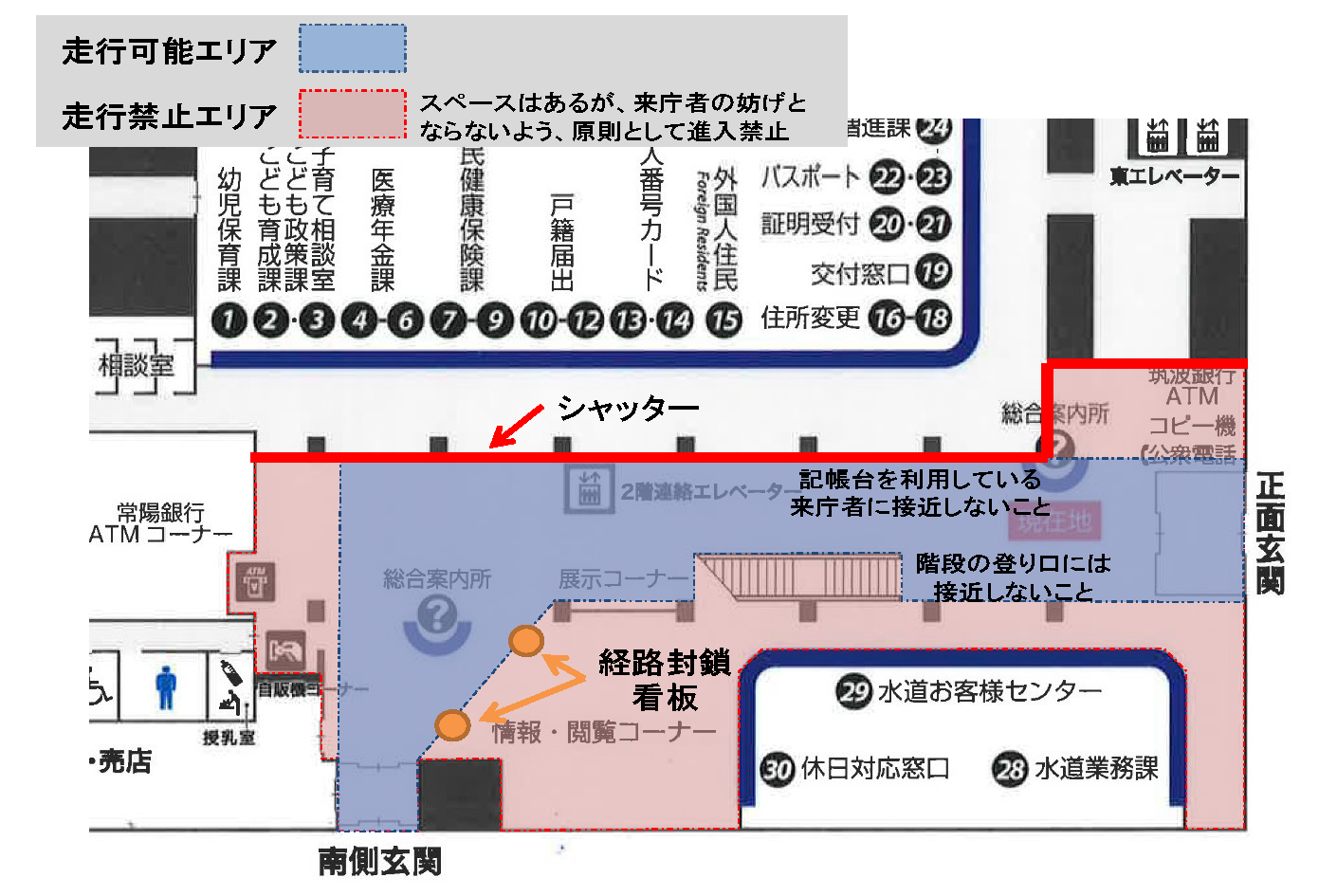
- ロボットがこのエリアに入れるのは本走行のみ
- ロボットに搭載しているセンサでの事前のデータ取得は禁止
- チームメンバーが事前の実験走行で現場を確認するのは許可する
手持ちのセンサなどでの計測の可否は、線引きが難しいため、各チームでの判断に任せる - 選択課題Aを実施するロボットは、確認走行区間の西側の1周ループ後に南側玄関から庁舎内に入り、正面玄関から屋外に出ること
- 走行可能エリアと走行禁止エリアの境界には、経路封鎖看板(後述)を設置する
- 走行禁止エリアに進入してしまった場合に限り、再挑戦できる
- 非常停止スイッチを押下した後に南側玄関の外側まで戻って、オペレータ操作により走行再開すること
- 市役所庁舎内コース(選択課題A)に再挑戦しても良いし、屋外の確認走行区間コースに進んでも良い
- 壁などに衝突しそうになって非常停止スイッチを押下した場合は、通常の走行と同様に走行失敗とする(再開不可)
- 庁舎内には一般の来庁者がおり、記載台の利用などでロボットに気付いていないかも知れないので注意すること
- 出入口となる南側玄関と正面玄関のガラスの自動ドアは、高さ 0.6 m 程度の不透明なプラダンで養生する
横断歩道
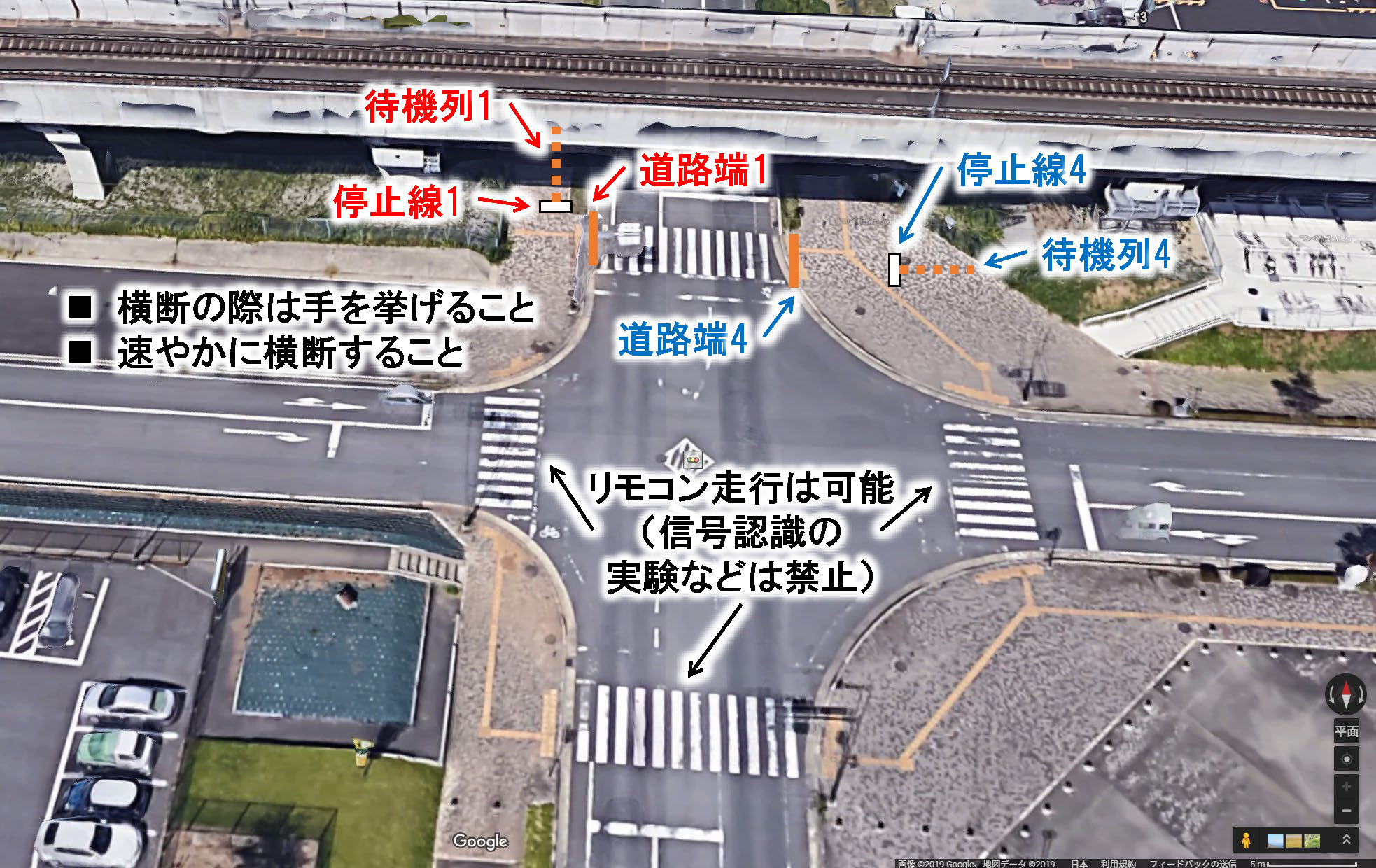
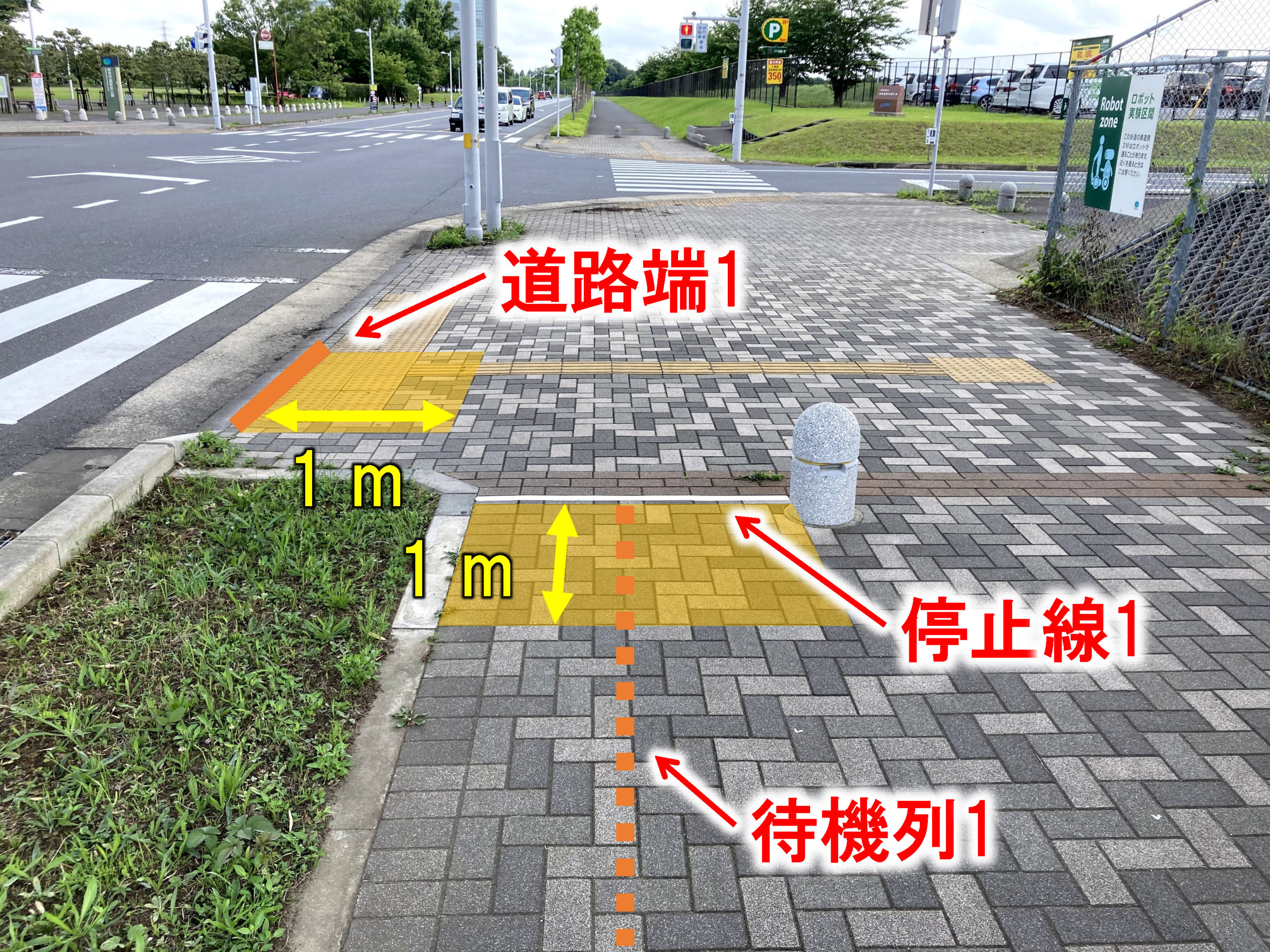
信号あり横断歩道
| 停止線1 | 停止線4 |
|---|---|
 |
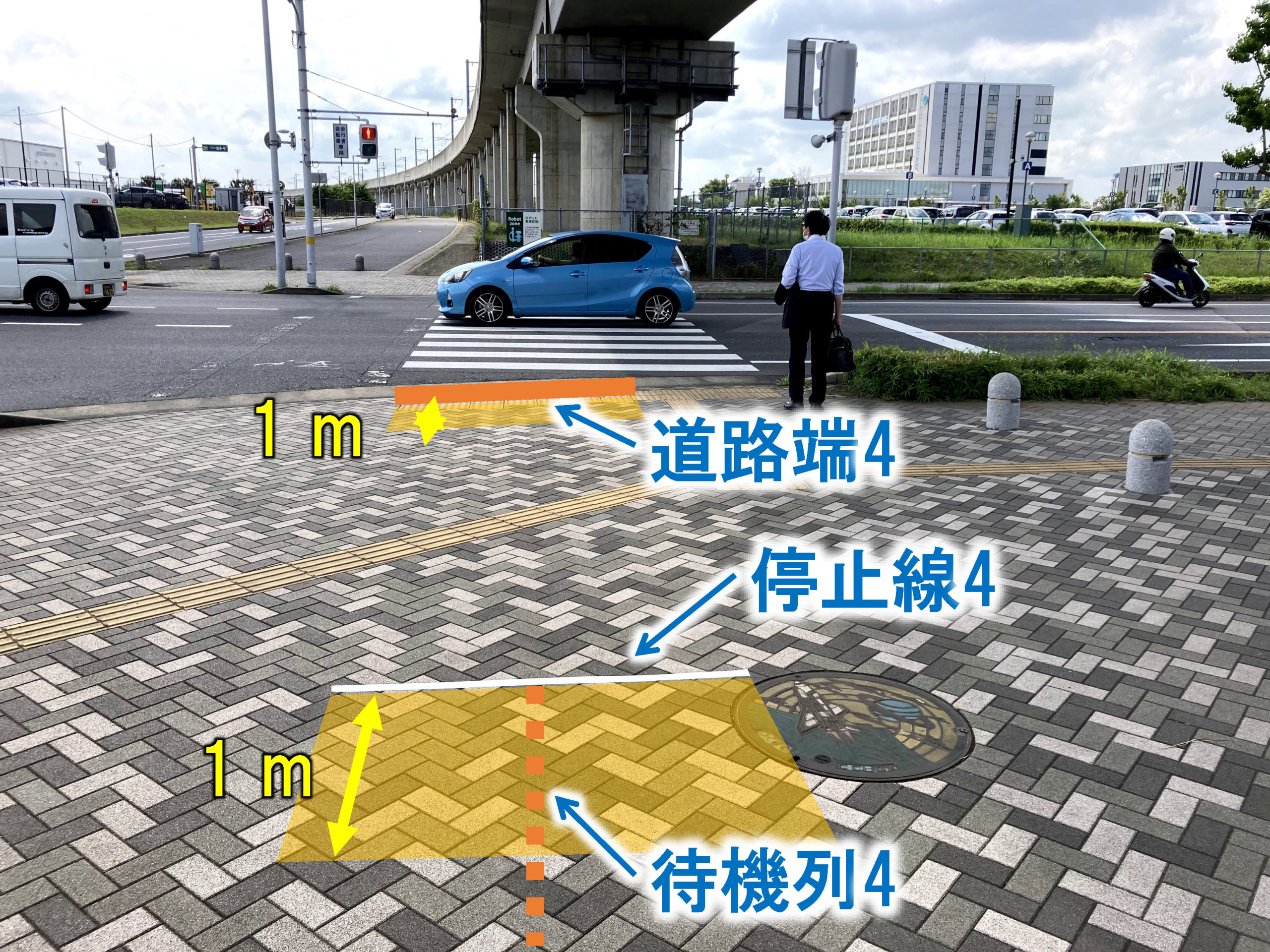 |
- 待機列:横断歩道を渡る順番を待つための複数台の待機列(待機列を示すガイドとなる白線は設置しない)
- 停止線:待機列の先頭の一時停止位置の基準(白線を設置する)
- 道路端:信号待ちをする一時停止位置の基準(白線は設置しない)
信号あり横断歩道では、横断方法を以下の2通りから選択
- 信号認識横断(選択課題B)
- オペレータ操作1回
- 自律走行で待機列に一列で並び「停止線」の手前で自律的に一時停止
- オペレータ操作により走行再開し、「道路端」の手前まで進んで再び自律的に一時停止
- ロボットが歩行者用信号と自動車の状況を認識して、自律で横断開始
- 手動トリガー横断
- オペレータ操作2回
- 自律走行で待機列に一列で並び「停止線」の手前で自律的に一時停止
- オペレータ操作により走行再開し、「道路端」の手前まで進んで再び自律的に一時停止
- オペレータが青信号と横断可否を確認して、オペレータ操作で横断開始
- 自律走行のロボットは、必ず待機列に並び、1回の青信号で片側1台ずつ横断する(往復を合わせて2台)
- 信号認識横断と手動トリガー横断のいずれの渡り方を選択しても、同じ列に並ぶこと
- 待機列では、後続のロボットは前のロボットを追い越さないように一列で待機すること
- 列に待機しているロボットは、前のスペースが空いたら前進すること
- 記録走行と本走行では、待機列で前のスペースが空いているのに約90秒間以上停滞した(目安として 1 m 前進しない)場合は走行失敗とする
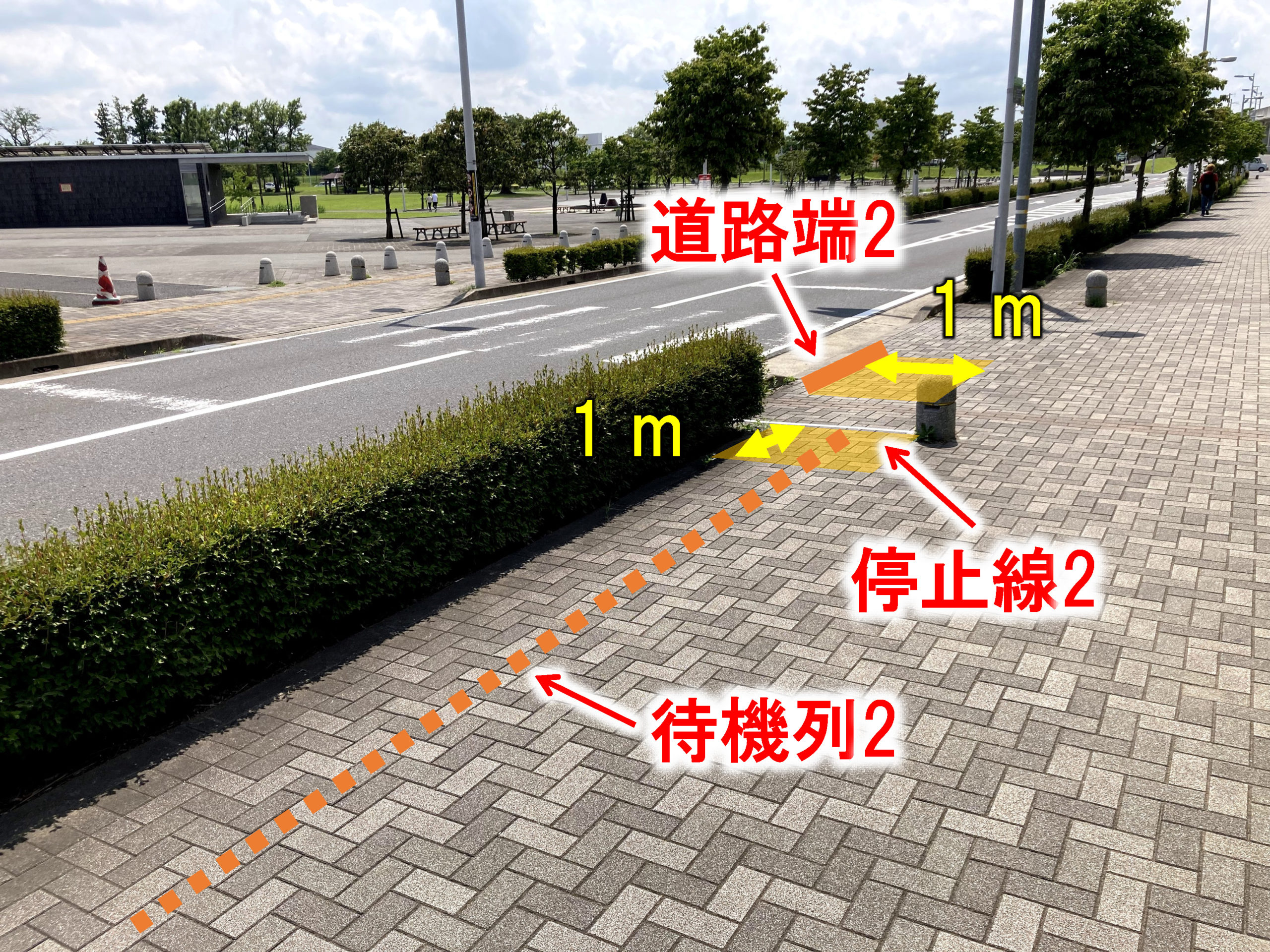
- 停止線や道路端では、手前 1 m 以内で自律的に停止すること
- データ取得などの目的でマニュアル走行(リモコン走行/手押し走行)で横断する場合は、待機列を追い越して進んでも良い
他のロボットや一般の歩行者の通行を妨害しないように注意し、オペレータの判断で横断すること
信号認識横断(選択課題B)
- 選択課題Bを実施するロボットは、歩行者用信号と自動車の状況を認識し、横断を開始すること
青信号だけではなく、交差点内の自動車の状況も認識する必要がある - 歩行者用信号が青でも自動車が交差点内に残っている状況では、横断を開始しないこと
- 右折や左折で進入してくる自動車は、委員が旗で交通整理する
信号なし横断歩道
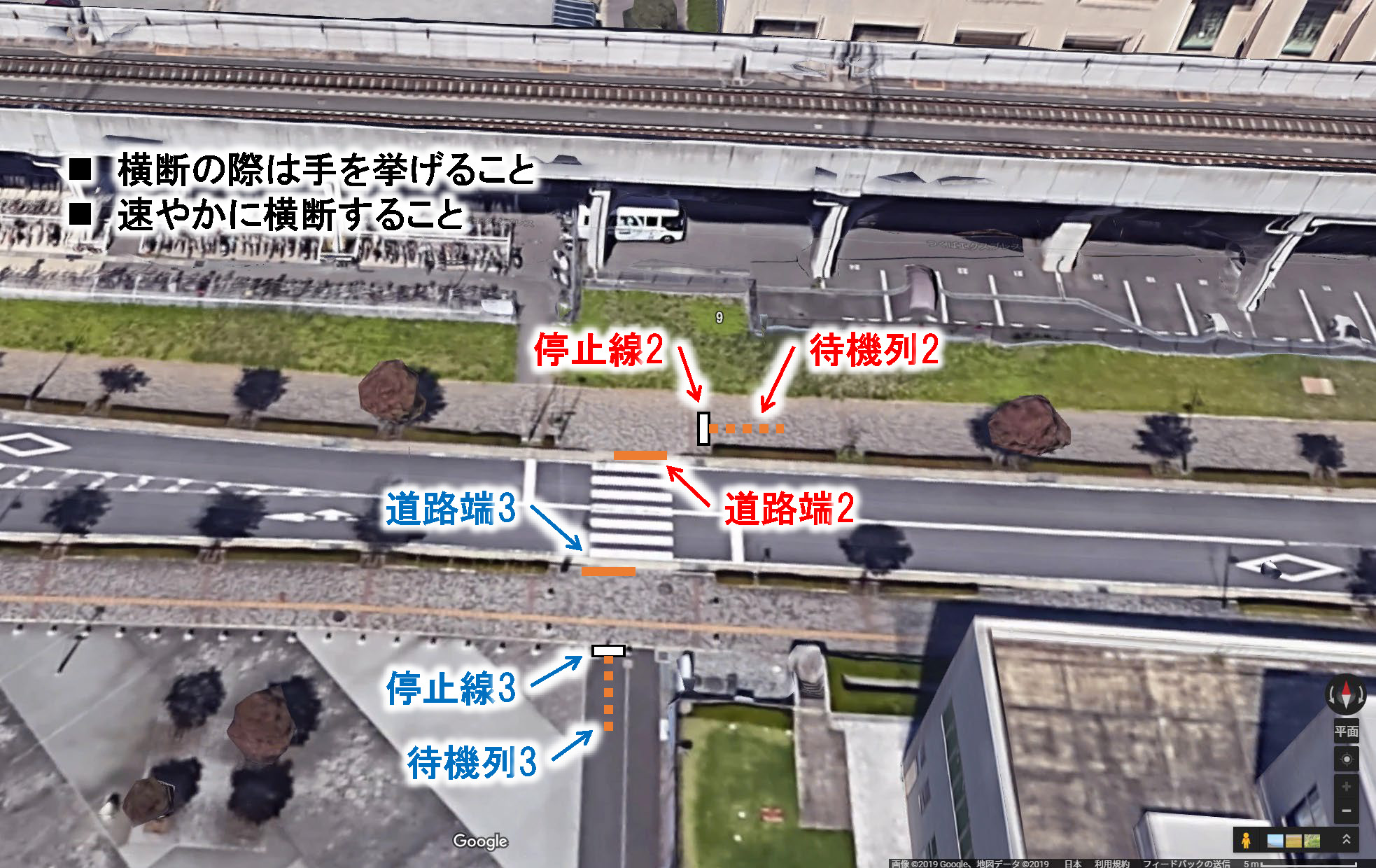
| 停止線2 | 停止線3 |
|---|---|
 |
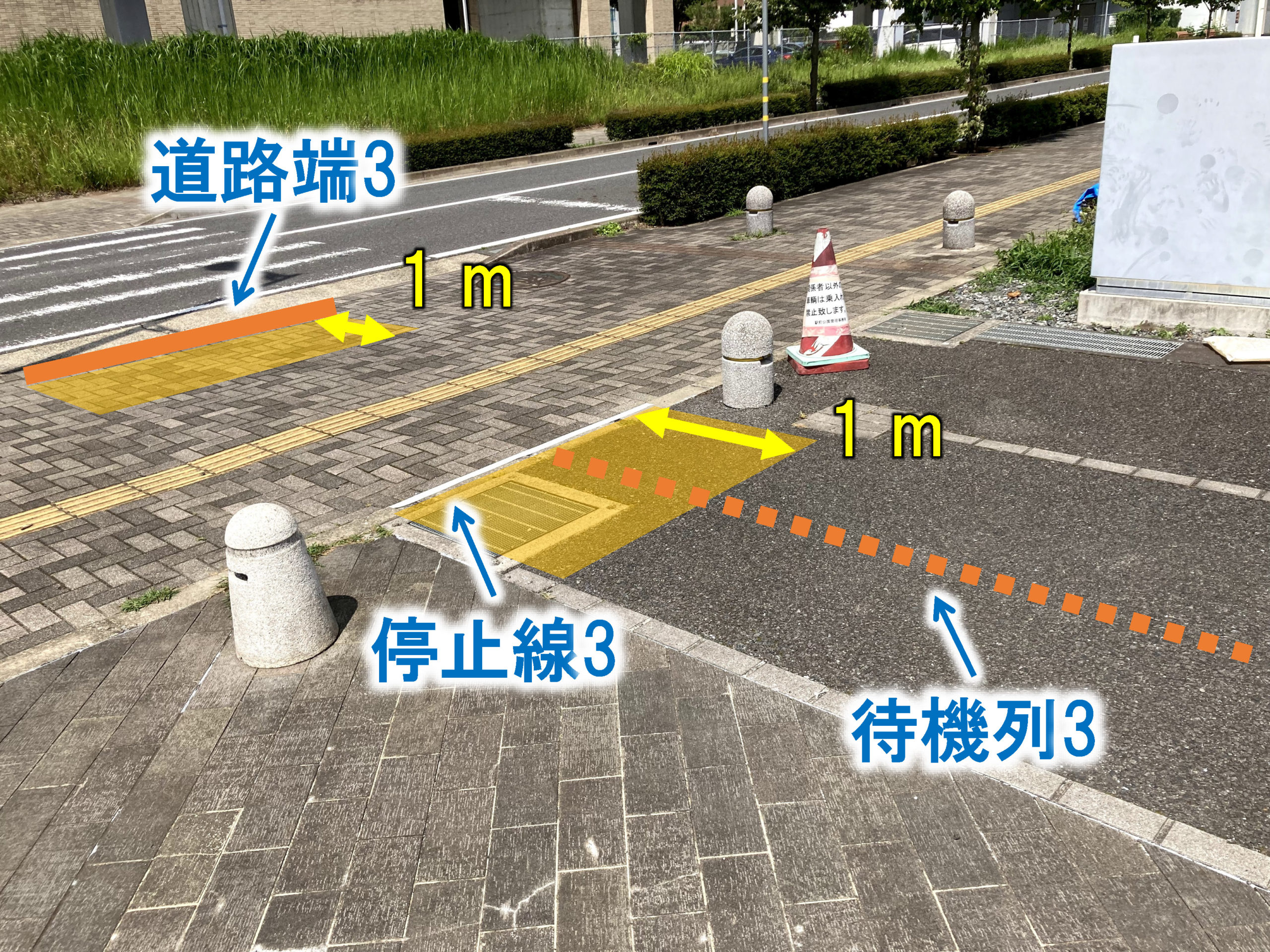 |
- 待機列:横断歩道を渡る順番を待つための複数台の待機列(待機列を示すガイドとなる白線は設置しない)
- 停止線:待機列の先頭の一時停止位置の基準(白線を設置する)
- 道路端:信号待ちをする一時停止位置の基準(白線は設置しない)
信号なし横断歩道では、全ロボットが手動トリガー横断(上記の信号あり横断歩道の手動トリガー横断に準ずる)
横断歩道での注意事項
- 走行再開などのオペレータ操作は、委員の指示に従うこと
右折や左折で進入してくる自動車は、委員が旗で交通整理する - 危険を感じた場合は、安全確保のため即座に非常停止スイッチを押下すること
押下した場合の評価は課題達成の評価方法ページを参照 - 歩行者用信号が青でも自動車が交差点内に残っている場合は、直ちに非常停止スイッチを押下するなどして飛び出させないこと
特例として、必ずしも自律走行の失敗とは判断しない(選択課題Bは失敗とする) - 対向横断のロボットと正対して走行が停滞した場合は、直ちに非常停止スイッチを押下し、手動で横断歩道の外側へ移動すること
特例として、必ずしも自律走行の失敗とは判断しない(選択課題Bは失敗とする) - 歩行者用の青信号の点灯および点滅の間に、横断を完了していなければならない
青信号での横断が不可能と判断した場合は、走行失敗として非常停止スイッチを押下し、手動で横断歩道の外側へ移動すること - ロボットが横断歩道を通過するのに要する時間を、あらかじめ確認しておくこと
オペレータはこの時間に基づき、横断の時間的余裕を把握すること - 安全管理責任者は、横断歩道を渡る際に右左折車の確認を行い、手を挙げるなどしてドライバーに注意を促すこと
また、チームメンバーが交通の妨げとならないよう注意喚起すること
横断歩道上で非常停止した場合の再開手順
- 非常停止スイッチを押下した位置のまま、または「道路端」まで戻って、走行再開すること
待機列の「停止線」までは戻らないこと - 危険がなくなり、かつ青信号の点灯および点滅の間に横断可能とオペレータが判断した時点で走行再開すること
横断に要する時間に基づき、現在の青信号で走行再開するか、赤信号を経て次の青信号を待つかを判断すること
公園
コースを以下の2通りから選択
- チェックポイント通過+経路封鎖迂回(選択課題C)
- 前日に通知される複数のチェックポイントをすべて通過すること
- 事前通知なしの経路封鎖を認識して迂回すること
- 折り返し地点を通過すること
- 自由コース
- 探索エリアの経路を含め、自由にコースを設定して良い
- 折り返し地点を通過すること
探索対象発見の実施/不実施を選択(選択課題D)
静止障害物
- 緑ロードコーンを束にして静止障害物としてランダムな位置に設置する(全ロボット対象)
- 公園内の歩道に10ヶ所程度で、道幅の半分程度を塞ぐ
- 歩行者やロボットが通れるスペースを空ける(ロボット幅 0.75 m 以上)
- ロードコーンの個数は道幅に応じて可変
- 5 m 道幅:ロードコーン4個束(左端/中央/右端)
- 3 m 道幅:ロードコーン3個束(左端/中央/右端)
- 2 m 道幅:ロードコーン2個束(左端/右端)
- 左端/右端の場合は、ロードコーンの外側端を歩道の端と重ねて設置する
| 5 m 道幅:ロードコーン4個束、左端 | 5 m 道幅:ロードコーン4個束、中央 | 5 m 道幅:ロードコーン4個束、右端 |
|---|---|---|
 |
 |
 |
| 3 m 道幅:ロードコーン3個束、左端 | 3 m 道幅:ロードコーン3個束、中央 | 3 m 道幅:ロードコーン3個束、右端 |
|---|---|---|
 |
 |
 |
| 2 m 道幅:ロードコーン2個束、左端 | 2 m 道幅:ロードコーン2個束、右端 |
|---|---|
 |
 |
チェックポイント通過+経路封鎖迂回(選択課題C)
チェックポイント通過
- 公園内の交差点を、チェックポイント候補点とする(コース地図参照)
- チェックポイントとする番号は、実験走行日ごとに変更して前日に通知する(連続日は変えない)
本走行日は、前日の実験走行日とは異なるチェックポイントとする - チェックポイントは5ヶ所程度(全ロボットで同じ)で、通過の順番や間の経路は自由
- 選択課題Cを実施するロボットは、指示されたチェックポイントを通過すること(目安として半径5m以内程度)
停止する必要はなく、また交差点に入ってきた道に引き返して出ても良い - チェックポイントには、緑ロードコーンを設置して番号を表示する
チェックポイントの例

経路封鎖迂回
- 経路封鎖看板の設置で経路封鎖を表す
- 看板:スタンドプレート SP-901(イエロー)
- 印刷デザイン:イラストレータ形式、PDF 形式
両サイドに再帰反射テープを貼付
- 公園内の歩道に5ヶ所程度を設置する
- チェックポイント候補点(交差点)をつなぐ道ごとに1ヶ所以下
- 看板を2個、外側端を歩道の端と重ねて設置する
- 選択課題Cを実施するロボットは、物理的には通れるが経路封鎖であることを認識して、別の経路に迂回すること
- 芝生に進入して経路封鎖を回避した場合は、選択課題Cの失敗とする(他の課題は継続できる)
経路封鎖看板フラッシュ撮影

| 5 m 道幅 | 3 m 道幅 | 2 m 道幅 |
|---|---|---|
 |
 |
 |
探索対象発見(選択課題D)
探索エリア
- 指示されたチェックポイントから道なりで約 50 m 以内の歩道(可変部)および公園北西部の広場(固定部)を探索エリアとする
- 探索エリアの可変部は、隣接するチェックポイント候補点(交差点)までの中間点を越えない(階段は通らない)
- 探索エリアの可変部はチェックポイント周辺なので、実験走行日ごとに変わることになる
- 道の先にチェックポイント候補点がなくても、行き止まりまで道がある所は、探索対象がいるかも知れない
例えば、候補点 #23 や #31 の先の行き止まりにも、探索対象がいるかも知れない
探索エリア(可変部)の例

探索対象
- 探索対象は、マネキン人形3体
- 大人男性:紳士フレキシブルマネキン アイボリー
- 大人女性:婦人フレキシブルマネキン アイボリー
- 子供:マネキン トルソー 子供 113cm
- 一般的な服装の上に、実験走行日ごとに異なる色のビブスと帽子を着用する
- ビブス:メッシュベスト 6色(赤、青、黄、緑、桃、白)
アーテック チームベスト 無地、カラー 4520, 4521, 4522, 4523, 4524, 4525 - 帽子:つくチャレ帽子 4色(緑、赤、深緑、橙)、代替 URL
プリントスター 00700-EVM、グリーン×ホワイト, イタリアンレッド×ホワイト, フォレスト×ホワイト, オレンジ - 雨天時は、ビブスの下にレインコートを着用する
- ビブス:メッシュベスト 6色(赤、青、黄、緑、桃、白)
- ビブスと帽子の色は、実験走行日ごとに変更して前日に通知する(連続日は変えない)
本走行日は、前日の実験走行日とは異なるビブスと帽子の色とする - マネキン人形は、起立または椅子に着席している
様々な姿勢を取り、腕組みなどをしているかも知れない - 探索エリアの可変部と固定部で、合計3体を設置する
- 1つのチェックポイント周辺(可変部)には、最大1体の探索対象がいる
探索対象がいないチェックポイントもある - 固定部には、複数の探索対象がいるかも知れない
- 1つのチェックポイント周辺(可変部)には、最大1体の探索対象がいる
- 選択課題Dを実施するロボットは、発見した探索対象の 1.5 m 以内に接近して、3秒間以上停止すること
| 大人男性 | 大人女性 | 子供 |
|---|---|---|
 |
 |
 |